

Interstellar
-
Posts
11 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Gallery
Posts posted by Interstellar
-
-
ok. I am changing the weights value.. can you tell me whats the criterion? I mean do the sum of all three weights be a constant. for example in GA i made i fixed the criterion that sum of all weights should be 1..
-
By better i mean the rise time, overshoot and settling time is less in manual tunning than when it is GA optimized.. so i just want to ask is there some flaw in my coding or is the nature of GA?
or may be should i change the value of fitness weights?
-
Thank you so much for your help...
Yes, i changed the connector pane .. now its working fine.. but the problem is the result (the optimized value) by manual tuning is better than the GA method..
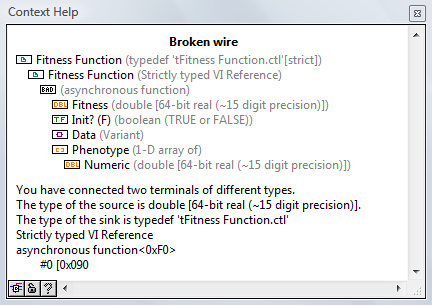
BTW what did you mean when you wrote "I saw that you use 0.001..0.1 range for one of parameters. It is a difference of two rows of order. In such case it is better to use logarithmic scaling to scale to 0..1 range."??
-
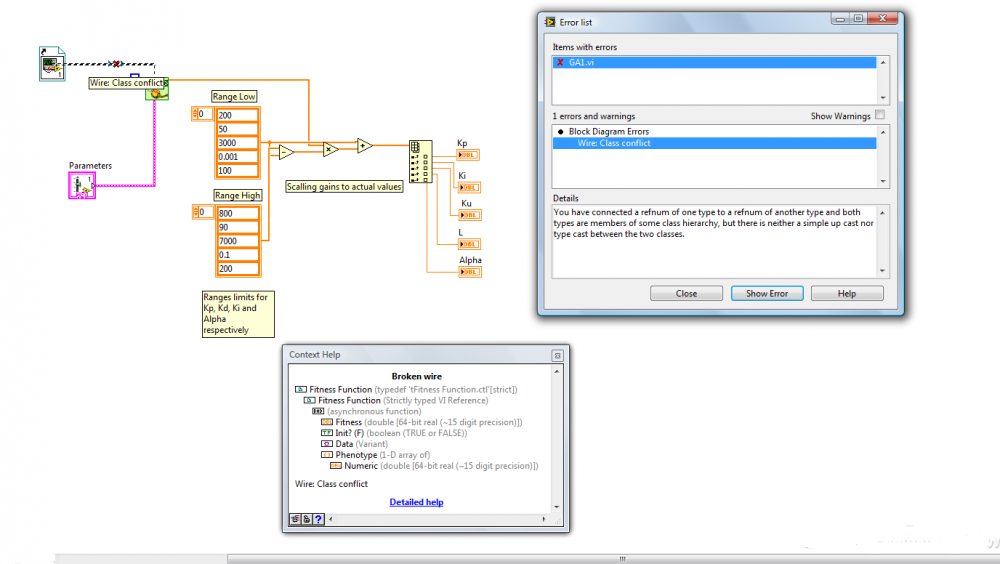
Little star appeared but there is still some error!!
Little star appeared but there is still some error!!
Little star appeared but there is still some error!!
-
I am still not sure how to implement it.. this is what i get after implementing it..
-
I am new to labview.. And I have not familiar with strictly typed VI.. so can please help me on that too?
-
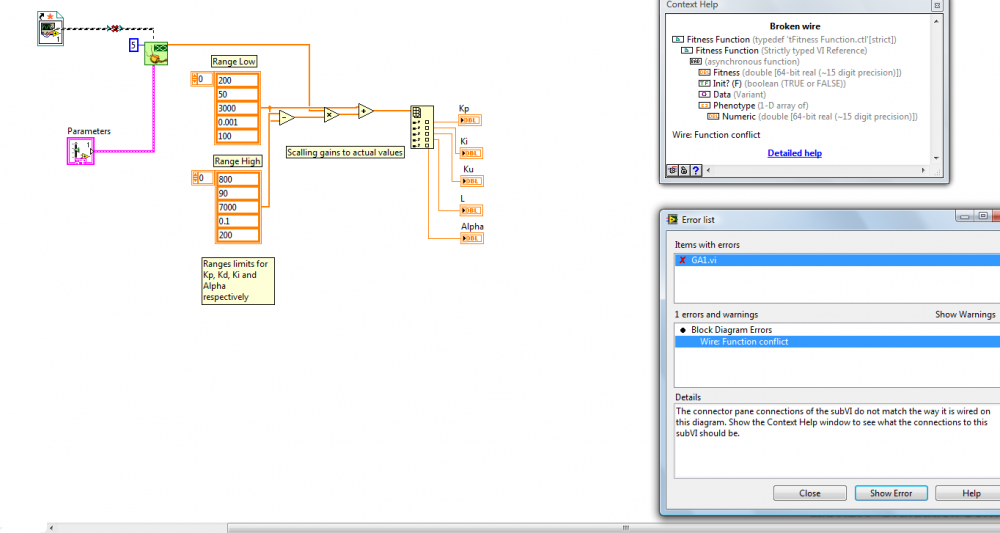
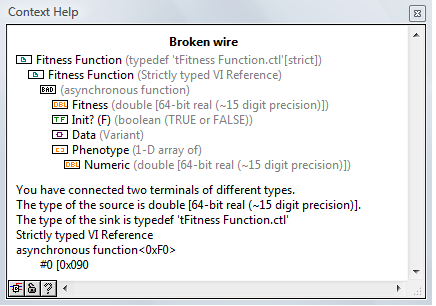
Hey, This is the error i get after making it.. i cant figure out what the problem is...
-
Sir, what must be the output of the Fitness Function? Or what must be connected to the terminal Fitness Function of waptia.vi?
-
Hey thank you so much for your effort and helping me.. I've just made PID controller and i m using very basic transfer function.. I'll try to make this and will let you know my status..
Thank you again for your help...
Short explanation first - this is continuation of ours private discussion, so I repeat some things already said.
Thanks for asking it - PID optimization is a very good use case for genetic algorithm. But you have to remember that it is only good for off-line optimization as it base on huge number of trials. So you have to have prepared a numerical model of your object of control - a program (VI in case of LabVIEW) which respond on control signal exactly the same way as real object would respond. To prepare it you have to know what phenomena drives your object, what are their equations and you have to implement them with proper coefficients (measured i.e.). To be more specific I have to know what exactly do you want to control with PID.
Once you have the model you have to insert it into simulated PID loop, so you have a model of whole control system with Kp, Kd and Ki coefficients as parameters (gains of proportional, differentiating and integrating blocks respectively). Than you have to determine what will be the measure of quality of regulation. Typically parameters of response on step-like excitation are used for this purpose:

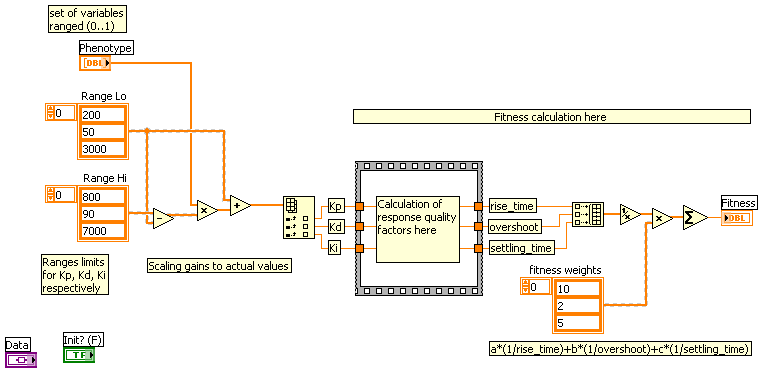
You have to decide which of these parameters are more important, which are less important, which are not important at all and combine them into one number which is the higher, the better regulation is. It may be for example weighted sum: a*(1/rise_time)+b*(1/overshoot)+c*(1/settling_time), where a,b,c are the weights. In genetic algorithm such a number is called a fitness function and PID optimization process may be now described as: find such Kp, Kd, Ki which maximizes previously defined fitness function. You have to implement a fitness function as a VI which takes certain Kp, Kd and Ki parameters, makes a simulation of control system's response on step-like excitation, calculates quality parameters out of the response and combines them into final quality measure.
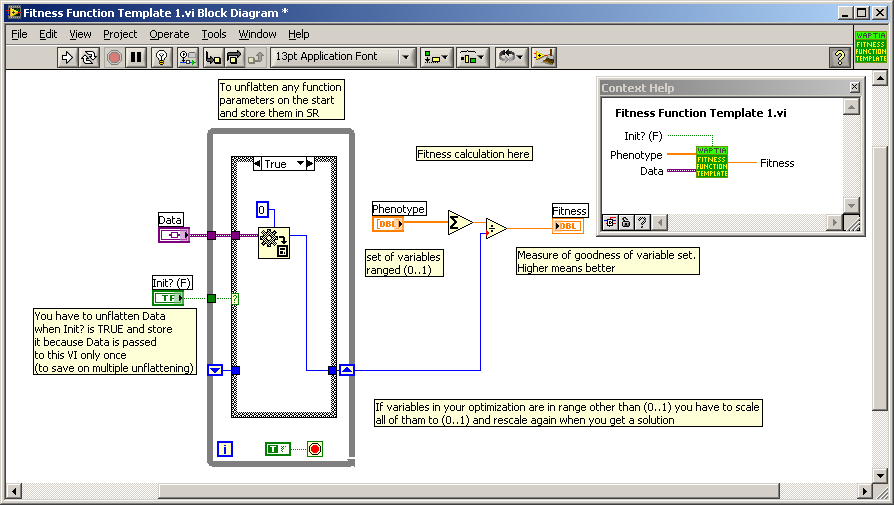
In Waptia you have to implement fitness function as a strictly typed VI. There is a special template in main Waptia directory (Fitness Function Template.vit):
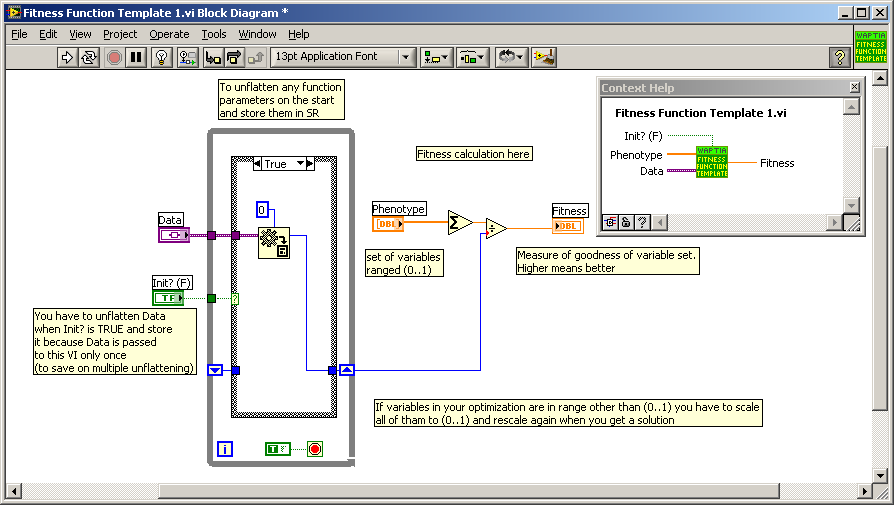
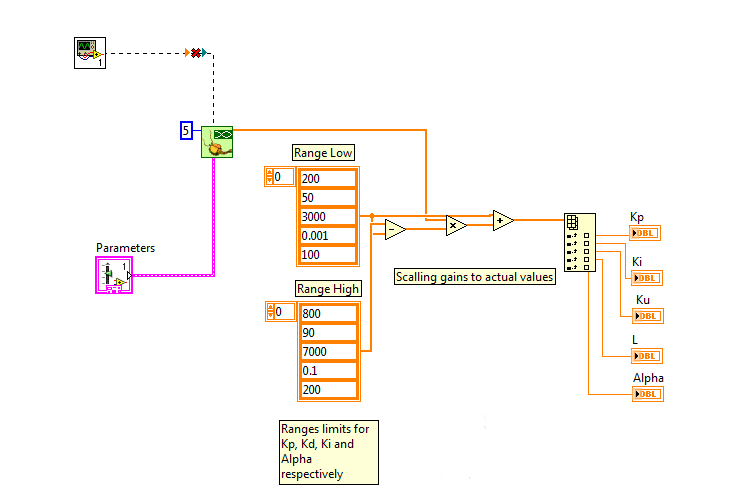
Phenotype input (1D array of doubles) in terms of genetic algorithm is a set of parameters describing the system, which are the subject of optimization. In our case size of this array will be always 3 and Kp, Kd and Ki will be coded in it. Coded, because optimizer requires all parameters to be scaled to 0..1 range. So you have to know the expected ranges for optimized gains (you could determine them using i.e. Ziegler–Nichols method and some manual checking). Your fitness function VI could look like this:
Data and Init? inputs are not required in simplest approach, but they may not be deleted as VI must be strictly typed. You could use these inputs to control other parameters of the models which are not to be optimized (i.e. coefficients of equations of the model).
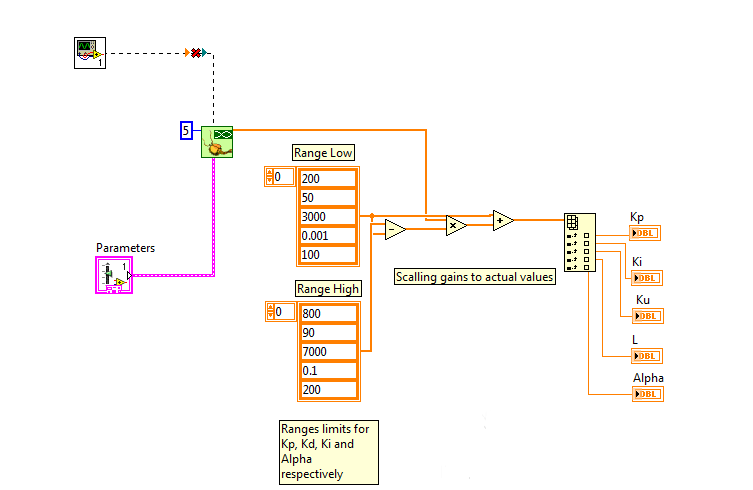
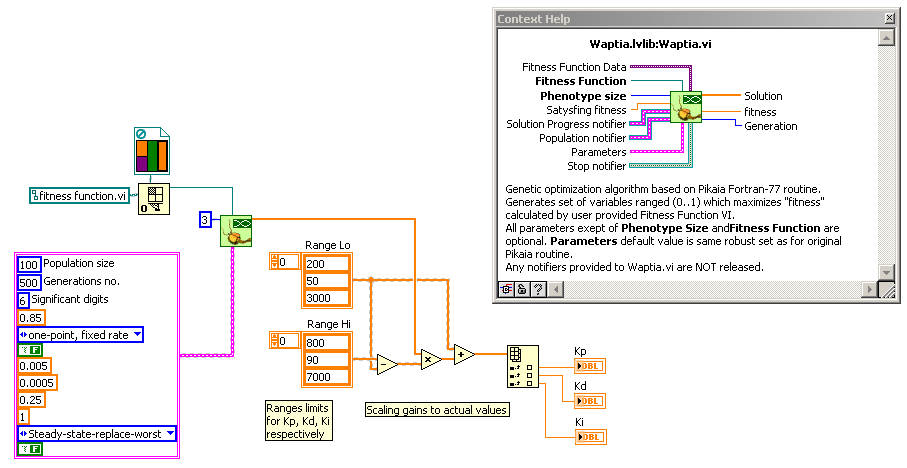
Code for actual optimization of PID gains is now as simple as:
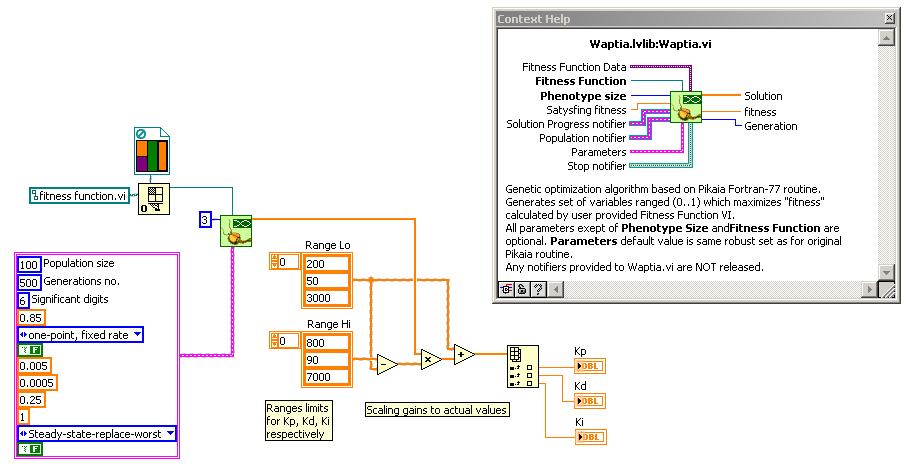
Values from final solution have to be scaled, because optimizer works on 0..1 range and it doesn't know anything about scaling you use. Most significant parameters for optimizer are population size , number of generations (both affect computation time) and number of significant digits. All parameters are described in documentation, but if you need more detailed explanation, don't hesitate to ask.
It was quite general introduction for PID optimization using genetic algorithm. To help in anything more specific, I have to know more details on what do you want to control. But if you already have a model as you said, you are very close to make an optimization of PID gains.
-
Hey,
I want to use genetic algorithm to optimize the gain of a PID controller.. Can this be done with help of waptia?
I have created model , control algorithm (PID) and a VI which calculates control quality factors out of such response (such as overshoot, settlement time or oscilations parameters) .
What should i do next to optimize the gains?
Thank you,,



[CR] Waptia - genetic optimization algorithm
in Code Repository (Certified)
Posted
thanks a lot!!