

denisetucker
-
Posts
9 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Gallery
Posts posted by denisetucker
-
-
QUOTE (mattdl68 @ Jan 3 2009, 11:42 PM)
typedef struct _GUID {DWORD Data1; WORD Data2; WORD Data3; BYTE Data4[8]; } GUID; where for example this GUID: eeaf37d0-1963-47c4-aa48-72476db7cf49 would be represented by:DATA1 = EEAF37D0DATA2 = 1963DATA3 = 47C4DATA4 = {AA, 48, 72, 47, 6D, B7, CF, 49}In this case, I'm returned ERROR_INVALID_DATA. I'll leave it up to you to find a solution... But here's my Windows Error Extraction class if that can be of help. (Just input the error code from GetLastError() and Merge it to LV error cluster.
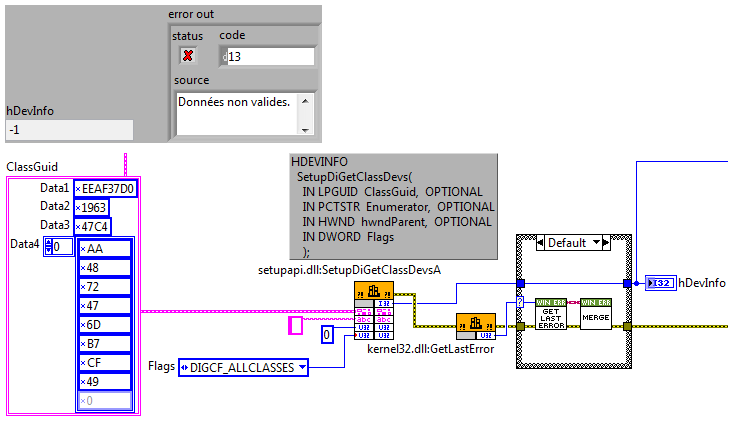
Download File:post-10515-1231128408.zip (LV 8.6)
Is this code available? The link does not work. Please?
-
Hi David,
Are you advocating scripting of 2 tick count vis into the error chain and then doing the subtraction to determine the measurement? Interesting idea, but then I guess I need to know a way to tack in those vi's into the error chain. And, often times, there may be some unbundling of an input cluster, in which case putting in the sequence structure ensures that you completely measure the timing of the vi.
I'm not sure I would want to do this with a LV2 global because, to have it be useful, it would need to be reentrant (otherwise you might use it in a vi running in parallel and foul up your measurements).
Thanks, Denise
-
I would like to automate something I end up doing fairly routinely...adding a flat sequence around some code and tick counts to determine how long a vi takes to run. After looking at Gavin's vi's (Thanks, Gavin!), I've determined how to add the sequence structure, but can anyone give me hints on tacking in the tick count and having it be _in_ the sequence frame?
Thanks, Denise
-
Ooops......
Works like a charm. Sweet. Many, many thanks.
Regards, Denise
-
Ok here is everything i have to work with the ROBO's , you will need to change some of the defaults since you have a different lead length. the first 3 things you need to do is INIT, POWER ON, HOME after that you can do whatever you need. these VI's still need some work , but, they got me through what i needed , i actually want to try to re-write them using LabVOOP. if you have any questions feel free to ask.
good luck
Dan
Here are the the protocol manuals that i have in case you or anyone else needs them ....
Hi Dan,
Popping up "ROBO init" brings up a Robo operation.ctl that is not found (in ROBO Cylinder (VISA) folder). Any chance you have that handy?
Thanks, Denise
-
What version of LV are you using ?? i will send you what i threw together to talk to these things....
Dan
Hi Dan,
LV 8.2. An example would be lovely.
Thanks much, Denise
-
THese cyclinder are really easy to deal with ONCE you figure a few things out , do you have the ROBO Cylinder Serial Communications Protocol document ?? if not i can scan it and send it to you....
Dan
Hi Dan,
Thanks for the amazingly prompt response.
Finally found the documment. (Their site is difficult to navigate.) I'm trying:
7) Position Inquiry
To poll the current position of a system addressed as #0 that has been homed to
the motor end and has a 12mm lead, send the following string:
Chr$(02) + 0R40000740008F + Chr$(03)
I'm sending this using the Basic Serial Write and Read at
38400,8,N,1, FlowControl=None, and a 1 sec delay before read. I've tried FlowControl=RTS/CTS. I've tried \n and \r\n.
Any suggestions?
-
Sounds like you might have found the command list for the robocylinder. Any chance you've still got your hands on it? I too am trying to develop a LV driver for it. Any hints?
Thanks, Denise
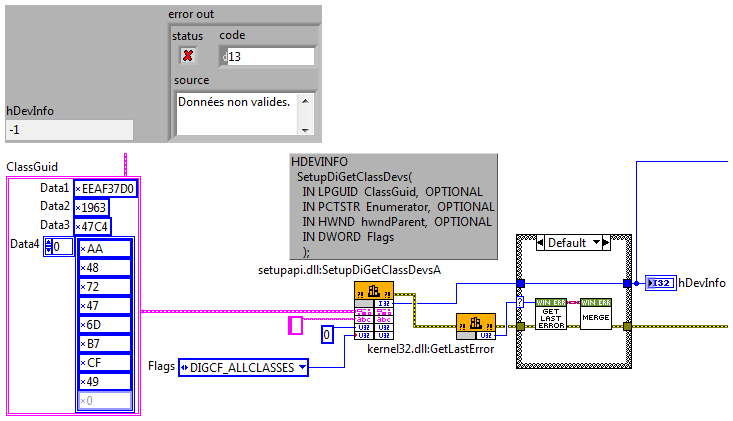
CONFIGURING WINDOWS SDK FUNTIONS IN LABVIEW
in Calling External Code
Posted
Thanks, Francois. I am actually interested in the HID specifically, but I appreciate you attaching the code. Looks like no one really got it working anyway. Bummer!