pakopon
-
Posts
10 -
Joined
-
Last visited
Recent Profile Visitors
2,096 profile views

pakopon's Achievements
")
Newbie (1/14)
1
Reputation
-
So, I could finally load a map and a Robot but still can't center the robot in the Scene. Anyone know how to do that? Greetings. PerspectivePlane.zip
-
Hello everybody, I don't know if this post should be here, but my program is a Real Time Localization Algorithm, so here we go. Up to now I can localize a Robot in a simple 2D map but I want to create a 3D prespective like in the attached image in Labview (the perspective of the image was also made in Labview), and I want to ask you, what would you use? I was thinking on a 3D mesh and use the blueprint of the building as texture. But, I was told that in Labview there's a really powerful tool called Robotic Environment Simulator (that I have installed) that can be used to simulate a custom 3D environment. Anyone has dealt with this problem before? Greetings and thanks in advance.

-
Thanks. I downloaded it and got the password from the autor. It works fine.
-
Hello. I need to match shapes using Hough Transform and I have found some implementations in Matlab and other languages but nothing in Labview. Have anyone tried this or do I need to reinvent the wheel? Thanks in advance.
-
Good method for detecting walls in a map
pakopon replied to pakopon's topic in Machine Vision and Imaging
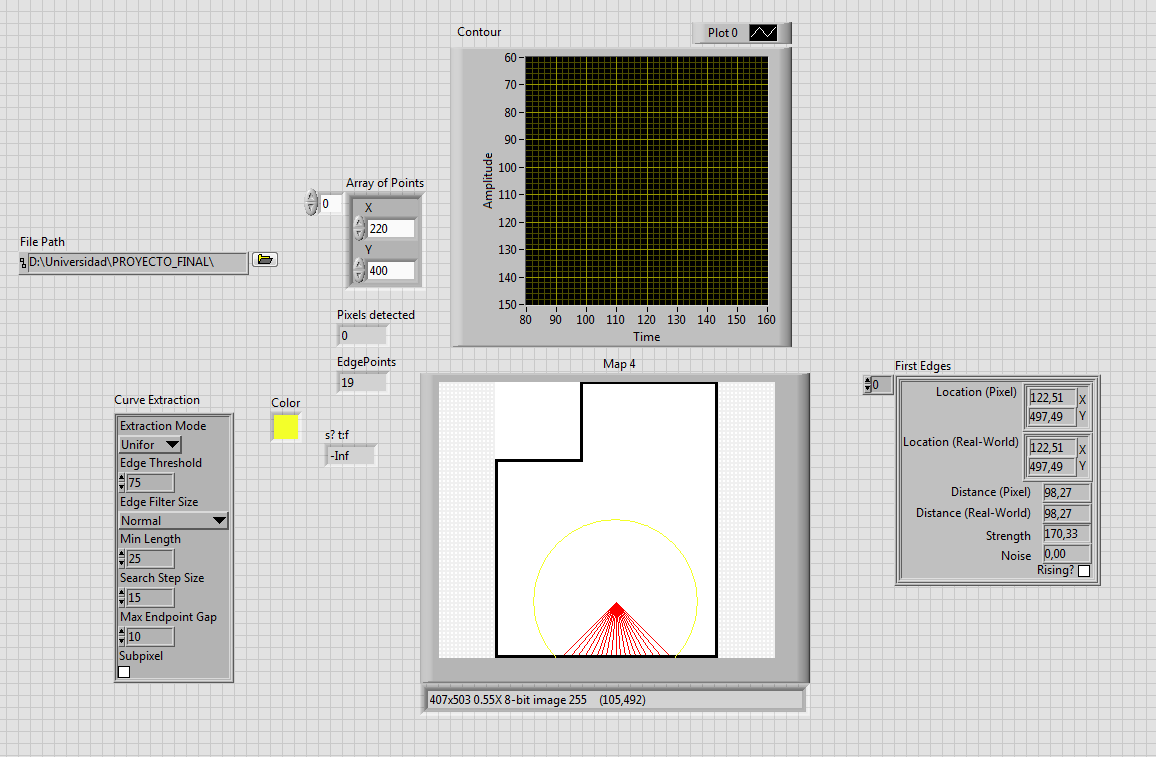
So, I tested "Spoke.vi" and I compared it with Extract Contour and simulated LIDAR lines. It works perfect for simulating a Robot Scan Match based on LIDAR devices, Thanks a lot.
-
Good method for detecting walls in a map
pakopon replied to pakopon's topic in Machine Vision and Imaging
I'll check it out. Thanks. -
Good method for detecting walls in a map
pakopon replied to pakopon's topic in Machine Vision and Imaging
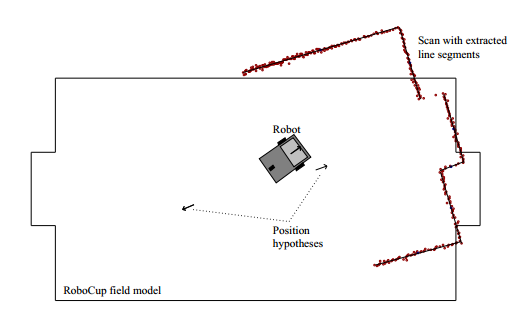
I though that was only for detecting circular shapes. I'll give it a try, lets see. Do you now any node to compute Scan/Line Matching given a map and a set of points defining a contour? Like in the figure I attached. I initially thought coding the algorithms manually, but since there's plenty of Machine Vision nodes in LabView 2011 I would like to use as much high level nodes as I can. I even saw some LIDAR nodes but they seem to be only for communication purposes, not for simulation. Thanks for answering.
-
Good morning, I'm spending a lot of time trying to convert a simple map into a set of segments in order to perform a Scan Matching with diferent robot poses for localization. I see there's a huge number of tools in Labview regarding Computer Vision and Pattern Matching but, until now, I can't find anything that satisfies my needs. I tryed Edge Detection.vi but it returns not only the segment of wall but a complete line from side to side of the ROI as you can try in the example I attached. In addition, Edge detection doesn't work well with diagonal walls. I could use Contour Detection.vi but it turns out that is computationally expensive according to perfermance profile plus it detects contours as points but I need lines because my map is composed of simple straight lines. Finally I tried IMAQ Rake 3 but I don't know very well how it works and there's no examples of use in the examples folder. Labview is an amazing programa with a lot of already made complex nodes, There must be a way to simulate what a robot equipped with a Laser Range Finder or LIDAR would see if running in a very simple 2D room. Thanks in advance. Find_Edge_Detection.vi
-
Thanks a lot!!! I thought that was for rectangles without orientation. But it accepts also an orientation parameter.
-
Good afternoon, everybody. I'm new here and actually working in a Localization Algorithm using LabView. I tried to extract walls contour from a simple floor plan to use it in my algorithm later. At first I thought doing it manually but then I realized there's a lot of high level VI's in Labview for computer vision. In example, "Extract contour" would give me the coordinates found in an image, so I wrote a simple piece of code to test it. But first, I need to select a ROI. I used "Rectangle to ROI" and added the imputs programmatically, but the Extract Contour VI doesn't accept it as a valid ROI and returns an error. I have absolutely no idea what's going on, because I create the same cluster that the info suggests as a valid input. You can try my attached code to see the problem by yourself using any image. Thanks in advance. RectangleContour.vi