

smithd
-
Posts
763 -
Joined
-
Last visited
-
Days Won
42
Content Type
Profiles
Forums
Downloads
Gallery
Posts posted by smithd
-
-
I think people see these technologies fundamentally differently to me. I see it as a way to "fix" what NI refuse to do. Maybe I have to address the general need rather than just my own and my customers' for this technology. I see developers being able to view/gather information and configure disparate systems in beautifully designed browser interfaces with streaming real-time data from multiple sensors (internet of things) Interfaces like this but with LabVIEW driving it. Customisable dashboard style interfaces to LabVIEW and interactive templated reporting - all with LabVIEW back ends. You can do this with these toolkits.
Wow, that freeboard.io page is pretty sweet. I played around with it and made something simple using the CVT, might post a little tutorial for interested parties if I have time. I like that it just takes a json blob and then lets you display it.
The only downside I can see (vs something like data dashboard) is you don't seem to have the ability to set values using it. Its probably not too hard to add some js to send value change events, but it'd be cool if it were baked in.
Also, if anyone ever uses their own web server like apache or nginx or whatever, and have found that its annoyingly painful to use, I found a shiny new alternative:
Basically everything in the folder with the exe will be served up by default, and then you can put in a "caddyfile" which has additional instructions. For example if you wanted to host freeboard using the main server and forward requests to /lv to a labview web service called "myWebService", you'd put this one single line in the file:
"proxy /lv localhost:8081/myWebService"
-
 1
1
-
-
For network comms I'd just read this:
http://www.ni.com/pdf/products/us/criodevguidesec2.pdf
Communication options are pretty numerous. There are stream-based mechanisms (TCP), message mechanisms (network streams, STM, web services), and tag based mechanisms (shared variables, OPC UA, modbus). The mechanisms are the same for cRIO and for PXI. Those are all examples, not the complete set. For a scada system, OPC UA is probably a great fit but you won't get waveforms for example. Many systems use multiple mechanisms.
-
Question: Do these toolkits support events (such as Shortcut Menu events, Cursor Events, etc.) and do they work with subpanels?
Is there a way to dynamically generate those non-value-change events? I was under the impression that was one of the roadblocks to UI testing automation. This thing seems to work around it but I dont know how.
-
Remember it's not just 3rd party tools. NI has shown lots of interest in their tools, and the linked keynote. Only recently have I seen a real need for something like this and will have to choose from one of them at some point. So no, I don't think it is common, but lots of people are asking for it, some must be using it.
Absolutely, and I've asked this question internally too. I'm really just curious, because I think its cool too and want to use it but haven't found a problem to throw it at

-
PXI rt doesn't support full displays--in fact, at this exact moment you're better off with the new atom cRIOs for that purpose. You can plug in a displayport cable and most UI elements (please please check them first) will render correctly. The big example of something that doesn't is subpanels (last I heard). This does reduce determinism (the GPU is firing off interrupts) but not as much as you might think. There are specs out there, probably but I don't think it goes above maybe 50 or 100 usec of jitter.
All the RTOSs use essentially a combo of preemptive scheduling (time critical, then scan engine, then timed loops, then normal loops) and round robin scheduling (between threads at the same priority). I'd recommend reading chapter 1, pg 24 (pdf pg 12) of this guide: ni.com/compactriodevguide
Don't take this as gospel, but I'd approximate the differences as:
-Pick cRIO if you need the ruggedness (shock, vibe, temp) features and you want a large number of distributed systems across a wider area. In exchange, you will lose some I/O count and variety vs PXI and you will lose most of your synchronization options vs PXI. Both of these limitations are slowly being hacked away at -- for example in the last few years we've gotten GPS, signal-based DSA sync, XNet CAN (vs manual make-your-own-frames-on-fpga-can) and so on. cRIO is even closing the CPU power gap. Can achieve deterministic I/O through scan engine or FPGA programming. If you have dlls, VxWorks is really hard to compile for and Linux is really easy, but in both cases you'd need the source to cross compile. Linux cRIOs can support security-enhanced linux, making them the more secure software option.
-PXI is significantly more powerful even than the newest atom cRIOs and generally has better I/O counts and variety, if only because the power requirements are not as strict as they are on cRIO. If NI sells an I/O type we probably have it for PXI and may have it for cRIO. Can achieve deterministic I/O through hardware-timed single-point, available with DAQmx for certain (probably most, by now) cards. Since you can get the monster chassis, you can sometimes simplify your programming by having a ton of I/O in one spot, but then you may exchange that programming complexity for wiring complexity. If you have DLLs, pharlap may just run them out of box, depending on how many microsoft APIs they use, and which specific ones (pharlap is vaguely a derivative of windows, but very vaguely).
All that having been said its more shades of gray at this point. For example if you need distributed I/O you can use an ethernet (non-deterministic) or ethercat (deterministic) expansion chassis from any RT controller with two ethernet ports (ie most PXI and half the cRIOs out there). You can do FPGA on both, and you could even use USB R-series to get deterministic I/O as an add-on to your windows system.
-
I don't want to knock this because it really is pretty awesome (as are the many alternatives), but I'm curious for myself how often y'all end up actually needing tools like this? I feel like it should be a ton given how many different options there are, but I personally have only had a few people come to me and say they wanted this...and even then, they really only wanted to see a demo and then they promptly forgot about it.
So...is this actually a common need and I just don't see it where I'm at, or is it more like "man look at this sweet thing I can do"?
-
This all works pretty well, but on many forums (especially NI forums) I see seasoned LV programmers saying that DVRs + IPE should almost never be used. I've considered using FGVs instead of the DVR, but that seems similar in that the data would be stored in the FGV instead of the class's private data DVR, so what is the difference?
I feel like I must be missing something here. It seems that class private data should be a DVR by default, otherwise what is the point if the class wire is forked? How do you guys deal with this issue?
The DVR is in the language for a reason and has high value, but don't use it just because you would use a pointer in other languages. The FGV is used for similar purposes but has disadvantages with regards to scalability, lifetime control, and code comprehension. But I also have a huge vendetta against the FGV. Other folks on the forum might say a DVR is just like an FGV with more annoying syntax and useless features.
I also use DVRs inside my object when I know I'm going to fork it. If you want to avoid DVR, I guess you can us a SEQ (Single Element Queue). Dequeue the object to "check out" and re-enqueue it to "check in". While the queue is empty, the next place that needs to R/W the object will wait inside its dequeue (as long as you let the timeout to -1 or make it long enough).
This can cause deadlocks more easily than a DVR and I believe I've seen aristos post elsewhere that fixing the SEQ is essentially the reason for adding the DVR to the language. The only advantage I know of for the SEQ is that you can make it non-blocking, but of course if its non-blocking you have to be really careful to manage state of the queue. However, I've never used an SEQ as I've only used LV for as long as DVRs have been around.
---
For your situation, it seems like messaging would be a better solution. For example, you say you want to distribute changes from the UI to multiple loops performing similar operations. You could potentially use an event structure in those loops and register for the front panel events directly (http://zone.ni.com/reference/en-XX/help/371361K-01/lvhowto/dynamic_register_event/). Similarly, you could use (http://zone.ni.com/reference/en-XX/help/371361K-01/glang/set_ctrl_val_by_index/) to directly update the front panel from the different loops. (Note this could work well if you just want to interact with the UI, if the changes are coming from many different sources a more general messaging scheme would be better).
-
Sorry, I don't think I was describing things properly.
All I was saying is, lets say I want to do XYZ with a TDMS file. You could do all the TDMS VI calls directly but from the other thread and my own experience you end up doing a lot of metadata prep before you're ready to log data, and even then you probably have some specific format you want to use. Rather than directly making some QMH to do all these things, I personally would prefer to wrap that logic into a small library.
I've tried to use 'off the shelf' processes in the past and have sometimes been unsuccessful because something I wanted wasn't exposed, the communication pipe was annoying to use, I had to use a new stop mechanism separate from the rest of my code, or similar. In these situations I either write a bunch of annoying code to work with the process, or I just go in and edit the thing directly until it does what I want.
The 1 file/QMH was really just me agreeing with ned and shaun -- I don't know what optimizations can be done by the OS or by labview but I don't want to get in the way of those by trying to make a single QMH manage multiple files.
-
You need to right click on the web service in the project and select start. Doing "publish" will have it run in the application web server context, while "start" runs in the project context (and I think probably doesn't show up in the WIF viewer).
-
I was trying to decide how I would describe the difference between an API and a Service succinctly and couldn't really come up with anything. API stands for Application Programming Interface but I tend to use it to describe groupings of individual methods and properties-a collection of useful functions that achieve no specific behaviour in and of themselves - "a PI". Therefore, my distinguishing proposal would be state and behaviour but Applications tend to be stateful and have all sorts of complicated behaviours so I'm scuppered by the nomenclature there.
Yeah thats true too, you could make a background service appear to be an API. I guess the difference to me is that with the service you're more likely to have to be concerned about some of the internal details like timing or, as in this thread, how it multiplexes. Its probably not a requirement, but maybe its just I feel like the complexity of a service is higher so I am less likely to trust that the developer of the service did a good job. For example, with a TCP service did they decide to launch a bunch of async processes or do they go through and poll N TCP connections at a specific rate? You do still have to be concerned about some things with a more low-level API/wrapper, but it feels like different ends of a sliding scale if that makes any sense.
-
I didn't read through the entire thread, but I thought I could still throw my thoughts in.
Generally I'd prefer to write a file API first, service second. I've repeatedly run into problems where services don't quite do what I want (either how they get the data to log or how they do timing or how they shut down or...) but the core API works well. I like the idea that the API is your reuse library and the service is part of a sample project, drop vi or other.
As for whether I'd just use the API vs making a service, I usually end up with a service because I do a lot of RT. Offloading the file I/O to a low-priority loop is the first thing you (should) learn. If timing isn't too important I'll do the file I/O locally (for example critical error reporting) and this is where starting from an API saves time.
Finally, having a service for each file vs multiple files handled by a single qmh/whatever...I'd tend towards 1 file/qmh for any synchronous or semi-synchronous file API as I'd rather let the OS multiplex than try to pump all my I/O through one pipe. This might be especially true if for example you want to log your error report to the C drive but then your waveform data to SD/USB cards. I'm guessing there are some OS level tricks for increasing throughput that I couldn't touch if it was N files/loop.
-
The only improvement I can suggest is to use the VI Name instead of VI Path. If you're attempting to use this on a VI that hasn't been saved yet, obviously the path will return not a path. The VI Name works because the VI is already in memory, it has to be because it is a dependency of the calling VI when you put down the static VI reference.
Also I think I remember reading the performance of this is better.
More generally, is this something that could be Xnoded? I don't personally have the skills for it, but it seems like its a pretty straightforward adapt-to-type deal.
-
1
-
-
its kind of hard to describe so I'm posting a picture:

So the refnums are in fact different for all of the wires, but if you close the reference you get out of the inserted VI property, bad things happen. In this case, for example, the first VI never shows up past the first run and if you try to open that VI's front panel it points you at the subpanel, even when the main VI is stopped. Weird stuff.
-
Its worth pointing out that the property you're referring to seems to return a single VI reference for any subpanel (at least in 2013). That is, if you read it you'll always see 0x00111111 even if you just passed in 0x00222222 or changed it to 0x00333333. This is fine-- you can still figure out which VI was inserted, but don't close that reference.
-
The cloud compile is fine unless you need to use IP cores or ip builder.
I just tried a Xilinx IP core in win10 with the 9607 target (so it should be using the newest Vivado) and it still doesn't work.
-
2
-
-
The way I've seen this done typically is to configure the path in on the diagram, and to use a separate (inlined) VI to store this path. The performance difference between hardcoded (in the node) and a path on the diagram is pretty minimal. It also makes it easy to update later on.
That having been said there are certain patterns hardcoded into labview. Seems like the easier route is to use the wildcard options:
The one in your post would be Filename**.*
-
2
-
-
So far as I know this isn't possible to work around since its an array. However it should be possible to get a "Mouse Down?" or similar event on the combo box which would potentially allow you to figure out which index you are at and then fill in the elements programmatically. The values would still be identical for all combo boxes in the front panel, but the user wouldn't know because the values change every time they click.
On the other hand, if you were just getting ready to manually edit each combo box's values by hand, it may be just as well if you simply make a cluster with all the combo boxes you need.
-
1
-
-
The lavag json library (https://lavag.org/topic/16217-cr-json-labview/) is pretty good and seems to have the capability to avoid issues like this. If you need XML, GXML and jki easyxml would probably also handle the variant (although I haven't tried it which I have with the json library).
-
1
-
-
Are we a very small minority to use this DVR and IPE with objects and sometimes run into circular references during development? Are others actually implementing their own Semaphores manually before the IPE structure? Is there a clean and simple solution that I am not aware of to circumvent this problem?
I am curious to know how people are fairing with this issue and if more people are interested, to make the suggestion from Chris more popular.
Definitely a small minority, since you'd have to have some way of creating a circular reference, but if you absolutely need that functionality I'm pretty sure everyone runs into it eventually. I hadn't thought of the semaphore but thats an interesting point. I don't know of any way to fix the issue. It gets especially tricky with property nodes on classes, since there isn't even an explicit IPE there. It just hangs

-
They don't ignore structure boundaries - click on them, and there is a transparent terminal. Not sure how they loop without feedback nodes though, I guess the wires have some special flags set?
I don't think there are any special flags. If you think about it, in any other queue situation you have to create the queue outside of the loop and pass it into the loop. The same thing happens here, but the terminal is colored weird to make it seem more like what you intend than what is really happening. I'm actually not sure where the create happens though.
Something Like This.... Auto generated then output to GraphML
Although it is fairly specific to application it might be able to be applied as a general tool. Some fairly rough code just to see if it was feasible.
Craig
Edited post to make the map file colour coded with the BD VIs.
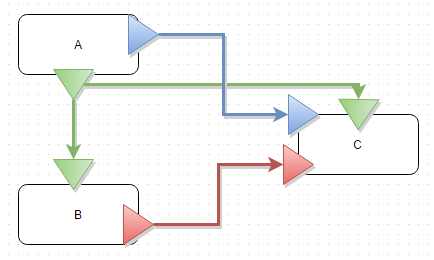
And heres where I really just don't get the removal of wires. Why are we hardcoding the queues for A, B, and C? None of that code cares what queue it reads from. Just using the wires means that your (well written) top level VI documents the communication path:
-
disclaimer for anyone who doesn't know me: despite the giant bright blue "NI" next to my name I am not in any way affiliated with R&D so don't take anything I say as a fact about the product.
IMHO, Channel Wires are definitely not Dataflow. But that's not necessarily a bad thing - LabVIEW has not been a pure dataflow language for decades (when did queues/notifiers/... first appear? Anyone still alive from back then?) And I can even see the point of having them - they provide a visual representation of that non-dataflow, and the various types of Channels just describe the transport mechanism.
The story I've heard is that they're asynchronous dataflow, similar as I understand it to http://noflojs.org/
This makes sense to me, based on the wiki:
Traditionally, a program is modeled as a series of operations happening in a specific order; this may be referred to as sequential,[1]
 .3procedural,[2] Control flow[2] (indicating that the program chooses a specific path), or imperative programming. The program focuses on commands, in line with the von Neumann[1].3 vision of sequential programming, where data is normally "at rest"[2].7
.3procedural,[2] Control flow[2] (indicating that the program chooses a specific path), or imperative programming. The program focuses on commands, in line with the von Neumann[1].3 vision of sequential programming, where data is normally "at rest"[2].7In contrast, dataflow programming emphasizes the movement of data and models programs as a series of connections. Explicitly defined inputs and outputs connect operations, which function like black boxes.[2]
.2 An operation runs as soon as all of its inputs become valid.[3] Thus, dataflow languages are inherently parallel and can work well in large, decentralized systems.[1].3[4] [5]So to me it sounds like the big thing that makes something dataflow is that you can explicitly visualize the routing and movement of data which is exactly the intent of these wires (as I understand it)
Something else I agree with, but isn't so far as I can tell in the explicit definition, is that an important part of dataflow's simplicity advantage is that data isn't shared. You see how it flows between items but you don't usually share it. When you do (as with DVRs or FGVs), you 'break' dataflow or at least break a key value it provides. Note that this is different from a queue, user event, or the new wires. In all these cases a given section of code explicitly sends information to another section of code without retaining access to that data. The data is sent but not shared.
But in NI's defense they did use visual queues to help show that it isn't just a normal wire, going into and out of structures don't use tunnels. This for me was enough to know they were special, but probably not enough for new developers.
But what if we had started 15 years ago (or whenever) with just these channel wires and queues had never been implemented as a separate concept? What if core 1 taught these wires? I don't really think it would be a problem for anyone experienced and it would reduce confusion for new developers (whats a sv? notifier? occurence? user event? queue? single element queue? rt fifo? who cares?).
I personally have zero plans to use these wires in anything I work on, but I do think that if we had created them first there would probably be no need to have added many of the others.
If I could look at the VI heirarchy and see where a particular VI contained a create node and which VI that create node was sending data to. That would be like a network map. If I could select a VI in the hierarchy window that has a create event (queue,or notifier) and see all the VIs that had its event registration. I would have a map of my messaging system If I could probe the wires between VIs; I would be frothing at the mouth.
If I could probe the wires between VIs; I would be frothing at the mouth. 
I'm curious what this looks like in your mind. Is it a more granular version of this (https://decibel.ni.com/content/docs/DOC-23262) or something else entirely?
Something that I'm not a big fan of is the giant fanout of queue wires that occur in many applications. It seems like the async wires would help with this as you can draw the wires between the subVIs which are actually communicating (A->B) rather than the current situation (init->A; init->B).
Also, I noticed your comment about shoving queues inside of subVIs and getting rid of the wires entirely. I've seen this many times before and never really understood it, but it seems related to how you want to visualize this stuff, so I'm curious how that concept ("vanishing wires") fits into your communication map concept.
-
1
-
-
I do think its more than 5%, but from what you described I don't think you're in that X%.
So...from a high level it sounds like what you want to do is spin up N workers, send them a UUT to work on, and then have the results recorded to disk. To be honest, I'm not sure why you need DVRs or any data sharing at all. Could you clarify?
->To me you'd have a QMH of some kind dealing out the work to your N workers (also qmhs) and then a QMH for logging which collects results from any of the N workers. You could do that with manually written QMHs, an API like AMC, a package like DQMH, or actor framework. Separating out worker functionality from logger functionality means (a) for those long running tests you could write intermediate results to a file without worrying about interfering with the test and (b) you can really really really easily switch it out for a database once you've decided you need to.
As a side thought, it sounds like you are re-writing significant parts of teststand (parallel test sequencing, automatic database logging and report gen, etc.). The DQMH library mentioned above seems to be written to work pretty well with teststand (nice presentation at NI week and I believe its also posted on their community page). Just a thought.
If I'm mistaken, or you can't use teststand for whatever reason the tools network does have a free sequencer which I think is pretty cool (although I do RT most of the time and never have a good chance to use this guy): http://sine.ni.com/nips/cds/view/p/lang/en/nid/212277. It looks like it could be a good fit for your workers.
-
1
-
-
Ah yeah I see, the blocking behavior is annoying. Thats always been a bit of a downer for the SVE, the fact that its mostly single-threaded.
Wouldn't help in this case, but there is a method for opening the variable connection in the background. This essentially sends a message to the SVE requesting that the connection get opened, and then you can use a property node on the last refnum in your set of connections to determine if the connections have finished opening. This is significantly faster than waiting for each connection to open individually.
-
Help says "Caution If you use this function to access a shared variable without first opening a connection to the variable, LabVIEW automatically opens a connection to the variable. However, this implicit open operation can add jitter to the application. Therefore, National Instruments recommends that you open all variable connections with the Open Variable Connection function before accessing the variables."
Generally I'd be sure to open all connections first and never use a read directly on an unconnected string. To me what you described is expected and desired behavior -- if the implicit connect failed it should retry, and your code should have sufficient error handling to deal with that situation.
Something else that may help is to use double libraries. That is your cRIO has a library with all the variables it needs hosted locally. The PC has a library with all its variables locally. Then when you're ready to test them together you bind the appropriate variables. Then no variable is ever missing.
Choosing an RT Solution : cRIO or PXI
in Real-Time
Posted
Xnet is supported with the newer modules. The only CAN module which requires FPGA coding is the really old one. PXI only has XNet so you're safe there. As mentioned, serial can be done through RT/VISA-only, you just need the right driver.
Also as mentioned, the general use for RT is to have a separate controller and HMI. This improves determinism but is also kind of freeing -- its a ton easier to separate work out to multiple developers so long as you all know what communication you're using to interact. And of course you can use whatever mechanism you want. Frequently I've seen the host side of the scada system written entirely in .net or java while the RT portion is labview, and that works nicely.