

soupy
-
Posts
49 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Gallery
Posts posted by soupy
-
-
I actually just got finished wasting an entire day on this exact issue. In my case it was due to the front panels of the dynamic VIs not being included in the builds. this results in the invoke nodes working on the VI refs to return error 1013 (http://digital.ni.com/public.nsf/allkb/BFDB388E06A4EAA086256FE9007D6174). this will not be obvious if you are not handling these errors....
To fix this issue, do one of the following:
- in the dynamic VI, goto File --> VI properties --> Window Appearance --> Customize... and check "Show front panel when called"
- on the block diagram of the dynamic VI, place a reference to any front panel control (it does not have to be wired up)
- Go into the executable build specification and add the VI as "always included".
-
well, the IPE is essentially an "unbundle by name" which doesn't work in this case either. I would say that it is expected.
-
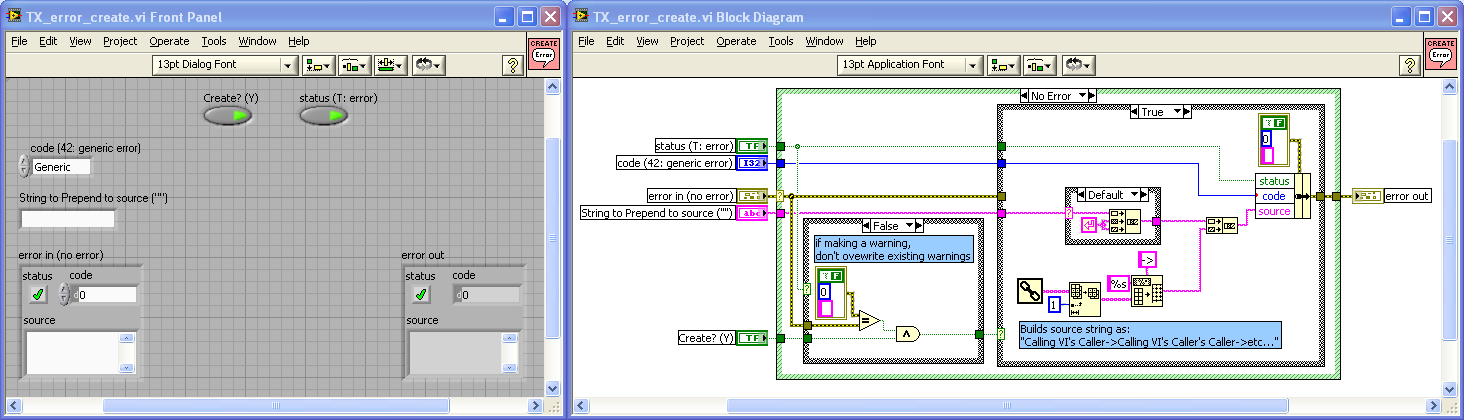
We use errors to indicate a task failure, so all subsequent operations are not performed. Because of this, we NEVER overwrite an error or change its code because it makes it hard to determine the origin of the error. We use warnings to alert the user of non-critical things (i.e. "Your DAQ card will require calibration in 30 days, contact QA for a replacement"). If an error is generated after a warning, the warning is overwritten.
To handle all of this logic, we use this VI to create an error:
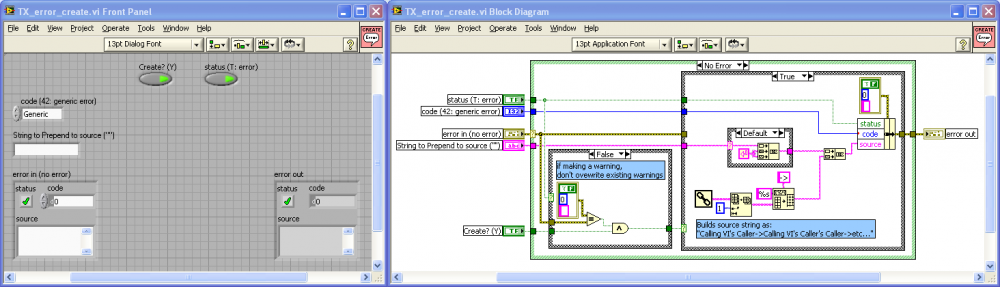
It has the features:
- can create error or warning
- code is an enum (similar to ogtk enum)
- created errors will overwrite warnings
- created error will not overwrite previous error
- created warning will not overwrite previous warning
- call chain is included in error source
- optional custom text can be pre-pended to source
typically we create a 42:generic error and just describe it with custom text or error details (i.e. Excel tab "foo" is not found)
Note: our software is used internally, so we are always a phone call away to describe what an error message means so messages can be a little more cryptic. if you are producing software for external release, you will have to generate messages that are a little more user-friendly
-
I find it most useful for transferring files (mostly photos and app installers) to/from my android phone without the need to find the USB cable (that i always lose). The web interface makes it nice so you can even do this at work!
-
Maybe they really are math operations or string utilities, but I don't see many programmers creating large libraries of those.
What a coincidence. I was just about to move my large collection of string functions into a library. From your comment, do you think this is a bad idea, or is it just not that common?
-
you can create a cluster control and disable the items you would like to be indicators, but i would not recommend it. you are setting yourself up for race conditions between reading from and writing to the array. I've been down this road a couple of times and it was not pretty.
Alternately, you can create clusters with zero pixel borders and keep the controls and indicators separate.
-
I don't understand the auto-tool hate.
1.) It is an option, you can turn it off.
2.) Its function is based on what pixel you are hovering over. Memorize the pixel context, turn down your mouse sensitivity and quit complaining.
3.) Yes, it doesn't switch to the paintbrush tool, but if you bind the tools palette to Ctrl+T (who tiles windows anyway?) then you're in business.
Seriously, auto-tool gets the job done if you know how to use it. Your inability to use a tool doesn't invalidate its usefulness.
-
 1
1
-
-
- Popular Post
- Popular Post
I love LabVIEW and it lets me develop dependable code quicker than anyone thought possible for a decent price. I'm sorry NI, but this is for your own good. You'll thank me one day.
- LabVIEW is the Apple of programming languages. You are only allowed to do what NI thinks you are smart enough to do. A little less hand holding would be nice. (I swear I'm smart enough to not create race conditions)
- It took you 25 years to develop a pointer (DVR) to data? really?
- yes, i understand 1EQs have been around for some time, but they are kind of a hack
[*]File dialog globally remembers last path[*]"lost" files in classes/libraries/xcontrols cannot be replaced with a file name that differs from the original lost file[*]ctrl+drag (the operation that "makes" space on the FP/BD) can't be disabled
- ever blow a hole in a case structure with 20 cases?
- datasocket/shared variables unpredictably gain/lose bugs every release cycle
- causes me to go through weeks of DS/SV qualification testing every time we upgrade
- Network malfunctions/dropouts are highly visible to end users. #1 reason why my upper management doesn't think LabVIEW is a real programming language.
- would drop DS completely and go with SV, but i don't wanna buy DSC for security features that were included in DS
- going to raw TCP/IP communication as soon as i can.
[*]LabVIEW Developer Suite does not include developer tools
- Express VIs don't count as developer toos
- Most webcasts/Virtural User Group presentations either cover basic/intermediate new user training or around something NI wants you to buy.
- Why can't they just be about becoming a better advanced programmer? Or how about an advanced application developer?
- You want to be a real advanced programming language, but you aren't giving your customers the tools to become advanced developers.
- The large application user group is a great example of this. gimme more!
- Most of us do not have computer science backgrounds. Anything you can do to bring in CS concepts and strategies would be appreciated.
[*]Front Panel objects are outdated
- #2 reason why my upper management doesn't like LabVIEW (a.k.a it doesn't look cool)
- customizing objects is difficult and kludgy. because of this, i don't have time to make things look pretty.
- if you released a front panel control dev tool, the NI community would solve this issue for you
Ok, now I'm done hatin...back to work.
-
3
-
You want to shoot yourself in the foot, but a race condition pulls the trigger before the bullet gets loaded in the gun.
-
Any idea if this effects performance?
Does this overlap any controls? I know that overlapping objects can cause LV to re-draw things and make things really slow.
-
Just found a useful site. It is basically a Twitter for data! You can update the site once every 5 seconds. It also has the ability to send data out to devices and whatnot.
I think I'm gonna use it to monitor the fermentation of my beer...
-
QUOTE (Neville D @ Sep 23 2008, 06:13 PM)
The Windows Performance Monitor I mentioned earlier, does EXACTLY that.N.
I'm sorry, I hadn't had time to fully investigate that VI yet. You are correct, it does exactly that (and more!). I'll make a VI just for processor usage and post it shortly.
Thanks all for the help!
-
QUOTE (jlokanis @ Sep 22 2008, 07:48 PM)
Awesome! This one is nice 'n easy.
Can you use .NET to query the processor usage of a program?
-
QUOTE (crelf @ Sep 19 2008, 05:32 PM)
Thanks, but it appears that eTree perfmon no longer exists on the internet. All the links for it are dead. Do you know of any web site that would still have it, or do you have it?
-
I have some processor intensive data acquisition and control programs that run on windows servers. Data integrity is extremely critical. I want to get all of the metrics I can to prove that data is good and determine how far away I am from "bad" data. Does anyone know a method to acquire the current CPU usage? A total usage will suffice, but levels for each core would be super awesome!
Thanks in advance,
-Andy
-
Yeah, this is really annoying. I have about 5000 indicators (over a couple of VIs) and I wanted to automatically place the units of each indicator as a caption.
I don't understand why NI can't make a property node for every action you can perform on an indicator.
-
QUOTE (bazookazuz @ Jul 7 2008, 10:24 PM)
Thanks!I used to use EWMA for all general filtering because it used minimal memory and was easy to use. Once I found out that you could do a boxcar average with minimal memory usage as well (see above post) I switched to it because it has better response time. I noticed the most improvement in response time when measuring the fill-rate on a high-noise system. In my case we would only fill for a few minutes, so response time was critical or we would over-fill.
As for the jitter issue i proposed above, I did some tests over the weekend and I did not see any signs of jitter errors. I ran noisy sine waves into the filter for an equivelnat of one week of run time at 100Hz.
Cheers!
Never mind, the code I posted above does not work. I thought it did, but it turn out to just be a slightly different version of the EWMA method. Apparently, there is no free lunch. Back to the drawing board...
-
QUOTE (Aristos Queue @ Jul 13 2008, 08:02 AM)
In the VI's menus, chooseTools >> Profile >> Performance and Memory...
Beware, the above method uses a good bit of processing power in itself.
I can't use it because I don't have the processing margin to support the performance calculations.
 Please tell me if I'm missing something here.
Please tell me if I'm missing something here.To get around this, I run performance tests on individual subVIs before integrating them into the main VI. If I am trying to find the performance hog in the main VI, I probe it with tick timers. I like tick timers because they tend to be more reliable than than the windows clock. Note that tick timing will not work if your loop rate is greater than 100Hz.
I like to use the attached tick timer VI. Let me know if it needs any improvements.
-
QUOTE (torekp @ Jul 1 2008, 08:12 AM)
Excellent, bazookazuz.I personally prefer to use exponentially weighted moving averages for most applications. The formula for it is EWMA(i+1) = EWMA(i)*(1-lambda) + latestDataPt*lambda. It's even simpler to compute, and does a nice job of smoothing. The only problem case I've ever seen where you wouldn't want EWMA is where machine error occasionally gives you wild numbers in the (usually negative, for some reason) billions while your real data is order ~ 1. In that case, boxcar moving average is better, because it comes back to sanity faster.
Thanks!
I used to use EWMA for all general filtering because it used minimal memory and was easy to use. Once I found out that you could do a boxcar average with minimal memory usage as well (see above post) I switched to it because it has better response time. I noticed the most improvement in response time when measuring the fill-rate on a high-noise system. In my case we would only fill for a few minutes, so response time was critical or we would over-fill.
As for the jitter issue i proposed above, I did some tests over the weekend and I did not see any signs of jitter errors. I ran noisy sine waves into the filter for an equivelnat of one week of run time at 100Hz.
Cheers!
-
I get a live rate of change by taking the delta between the current and previous point (use a shift register). Average this delta value to get a steady result (a boxcar filter works nice http://forums.lavag.org/Boxcar-running-ave...rray-t6848.html)
Cheers!
-
I completely have the Filter Pt-by-Pt VI because it is not included in the base package (which some of my users use) and it is horribly inefficient.
I prefer to use the attached method. It is polymorphic and works for filtering single or multiple channels. You only need two single point buffers for each channel you are filtering and the size of the average does not effect performance. I believe that you could experience some jitter when using this method, but it has not been an issue for my applications. I don't think it can get any better than this, expecially for averages lasting thousands of points.
Note that whenever filtering data you need to make sure that a +/-Inf or NaN cannot get "caught" in your shift registers. In this example I chose to ignore those values and just pass the last valid data. You can use this to filter out invalid data points, just convert them to NaN before passing them to the filter. I like to use this method to filter out bad thermocouple values that are caused by broken wires, etc.
Thoughts? Comments?
Another Lego Mindstorms NXT Rube Goldberg Machine
in LAVA Lounge
Posted
so why does he have $5k worth of LEGO lying around?