Search the Community
Showing results for tags 'ev3'.
Found 1 result
-
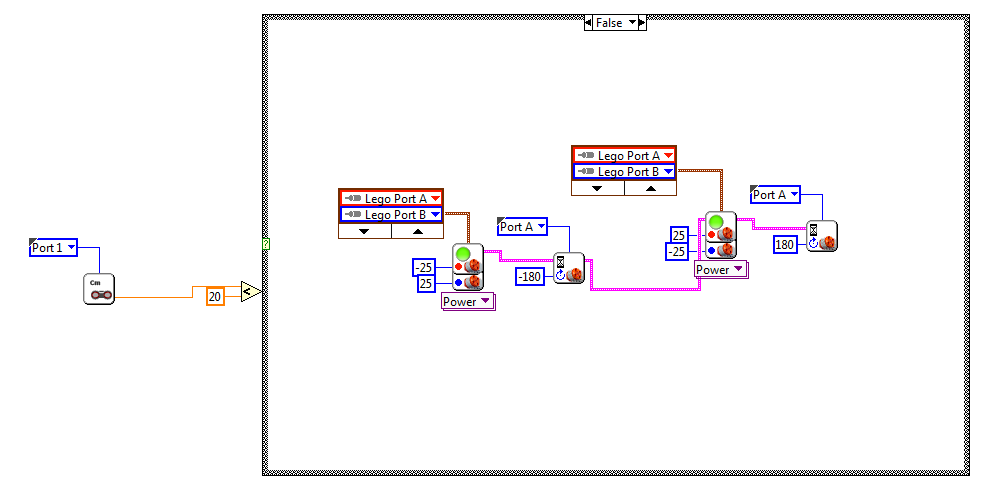
Hello I am trying to program my sumo ev3 robot , and i have a small problem . I am programming the ultrasonic sensor to read distance if it sees someone it attack them and so on . So when it is not seeing an enemy it should rotate a bit to the right a bit to the left but during that rotation i want the robot to detect the enemy and locate them however the robot is actually doing the whole sequence and even it it sees the enemy it doesnt go to the true statement unless it was the very end of the sequence when it detected the enemy . Thank You Best Regards