Search the Community
Showing results for tags 'optimization'.
Found 2 results
-
 Our CANbus driver contains 3 timed loops: - #1 prepares and sends outgoing messages - #2 receives and parses incoming messages - #3 handles events and check the communication status Our driver's performance are not satisfying enough (we want it to run at a 10ms rate). It works ok most of the time (11ms, 9ms, 12ms, 10ms, 11ms, and so on) but the gap between loop iterations sometimes jump to 200ms before going back to an acceptable value. Quick tests showed that it is related to a user's request to change what HMI to display in a completely unrelated area of our application. This logically led me to one obsession: making sure our driver never relies on the UI thread. To achieve that, I set the execution thread to "other 1" and the priority to "time-critical". I know setting the thread to "other 1" is not a full guarantee, so I also tried to get rid of everything that would force the VI to go to the UI thread: I got rid of all the indicators and all the property and invoke nodes. The performances have already improved a lot, and the HMI activity in other part of our application no longer seem to influence the timed loop iterations. However I'd like to see what else I could optimize: - I still have a "stop" Boolean control. When it is set to True from another "manager" VI, the driver has to stop. All 3 timed loops poll this control to know whether to exit (one directly through the terminal, the other 2 through local variables). I know polling is not great, but my main worry is: because this is a control, does the VI still go to the UI thread whenever it is polled? Or only when its value change? I should also mention that I am not ever opening the front panel of the VI. - Loops #1 and #2 need to be able to notify #3 that a read or write operation failed, so that #3 can take care of resetting the device and restarting the communication. Right now, #1 and #2 simply write the error in a dedicated error cluster (so I actually still have 2 indicators left I guess) and #3 polls those errors through local variables. Does that mean that at each iteration the VI goes to the UI thread since I am writing to those error clusters at each loop iteration? Any comment on optimization in general is more than welcome! Emmanuel
Our CANbus driver contains 3 timed loops: - #1 prepares and sends outgoing messages - #2 receives and parses incoming messages - #3 handles events and check the communication status Our driver's performance are not satisfying enough (we want it to run at a 10ms rate). It works ok most of the time (11ms, 9ms, 12ms, 10ms, 11ms, and so on) but the gap between loop iterations sometimes jump to 200ms before going back to an acceptable value. Quick tests showed that it is related to a user's request to change what HMI to display in a completely unrelated area of our application. This logically led me to one obsession: making sure our driver never relies on the UI thread. To achieve that, I set the execution thread to "other 1" and the priority to "time-critical". I know setting the thread to "other 1" is not a full guarantee, so I also tried to get rid of everything that would force the VI to go to the UI thread: I got rid of all the indicators and all the property and invoke nodes. The performances have already improved a lot, and the HMI activity in other part of our application no longer seem to influence the timed loop iterations. However I'd like to see what else I could optimize: - I still have a "stop" Boolean control. When it is set to True from another "manager" VI, the driver has to stop. All 3 timed loops poll this control to know whether to exit (one directly through the terminal, the other 2 through local variables). I know polling is not great, but my main worry is: because this is a control, does the VI still go to the UI thread whenever it is polled? Or only when its value change? I should also mention that I am not ever opening the front panel of the VI. - Loops #1 and #2 need to be able to notify #3 that a read or write operation failed, so that #3 can take care of resetting the device and restarting the communication. Right now, #1 and #2 simply write the error in a dedicated error cluster (so I actually still have 2 indicators left I guess) and #3 polls those errors through local variables. Does that mean that at each iteration the VI goes to the UI thread since I am writing to those error clusters at each loop iteration? Any comment on optimization in general is more than welcome! Emmanuel -
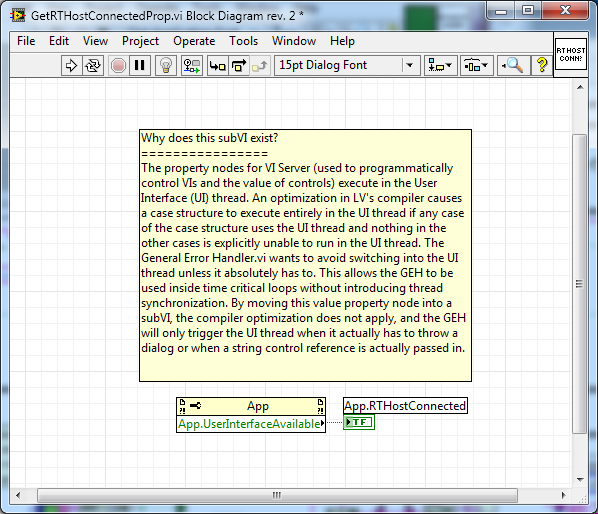
 I was mucking around in General Error Handler.vi today and noticed a weird subVI with a really intersting comment inside. Thought I'd share it with the crowd, since it applies to time-critical processes, thead swapping, and general compiler insights.
I was mucking around in General Error Handler.vi today and noticed a weird subVI with a really intersting comment inside. Thought I'd share it with the crowd, since it applies to time-critical processes, thead swapping, and general compiler insights.