Search the Community
Showing results for tags 'robot'.
Found 2 results
-
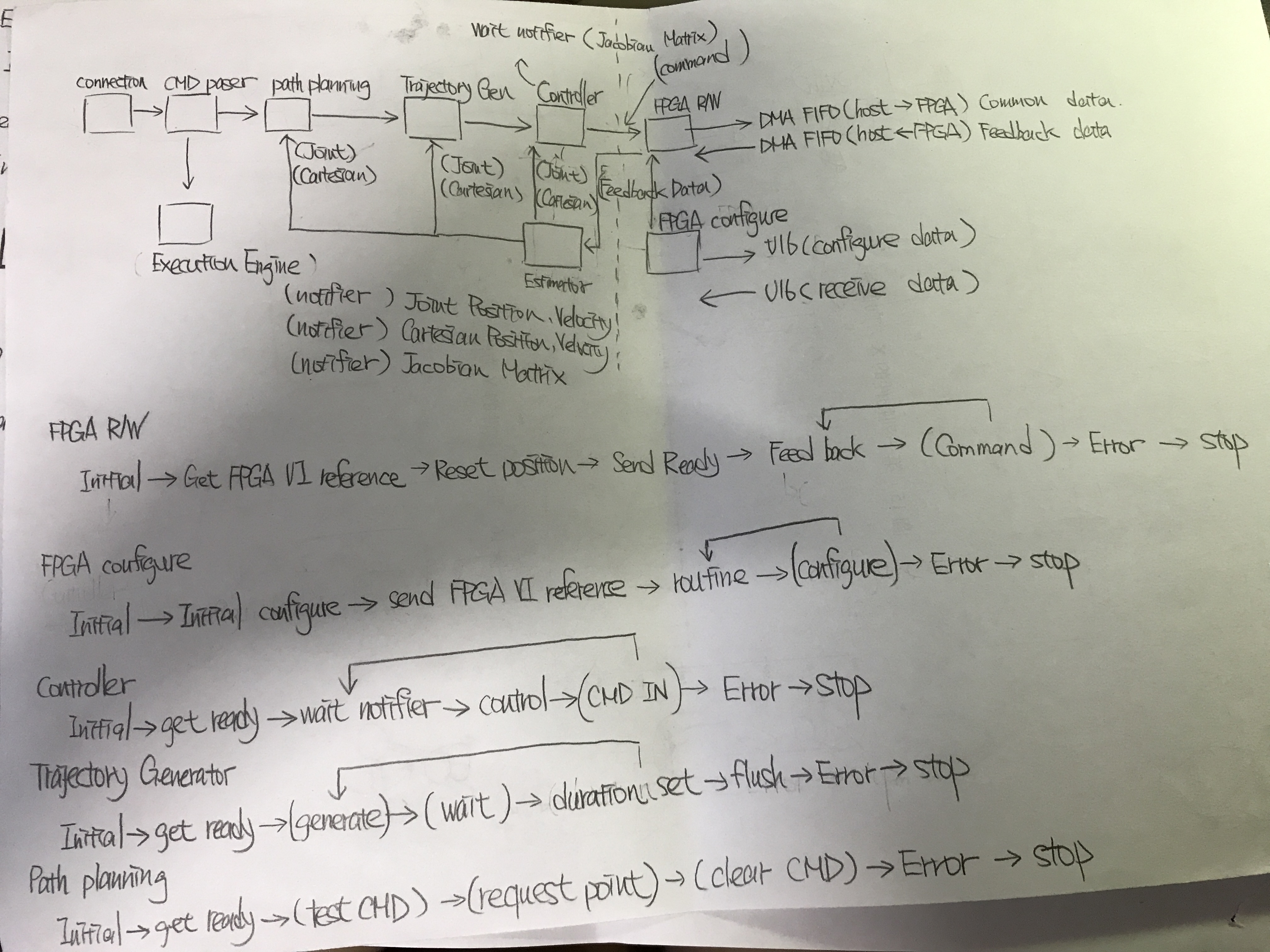
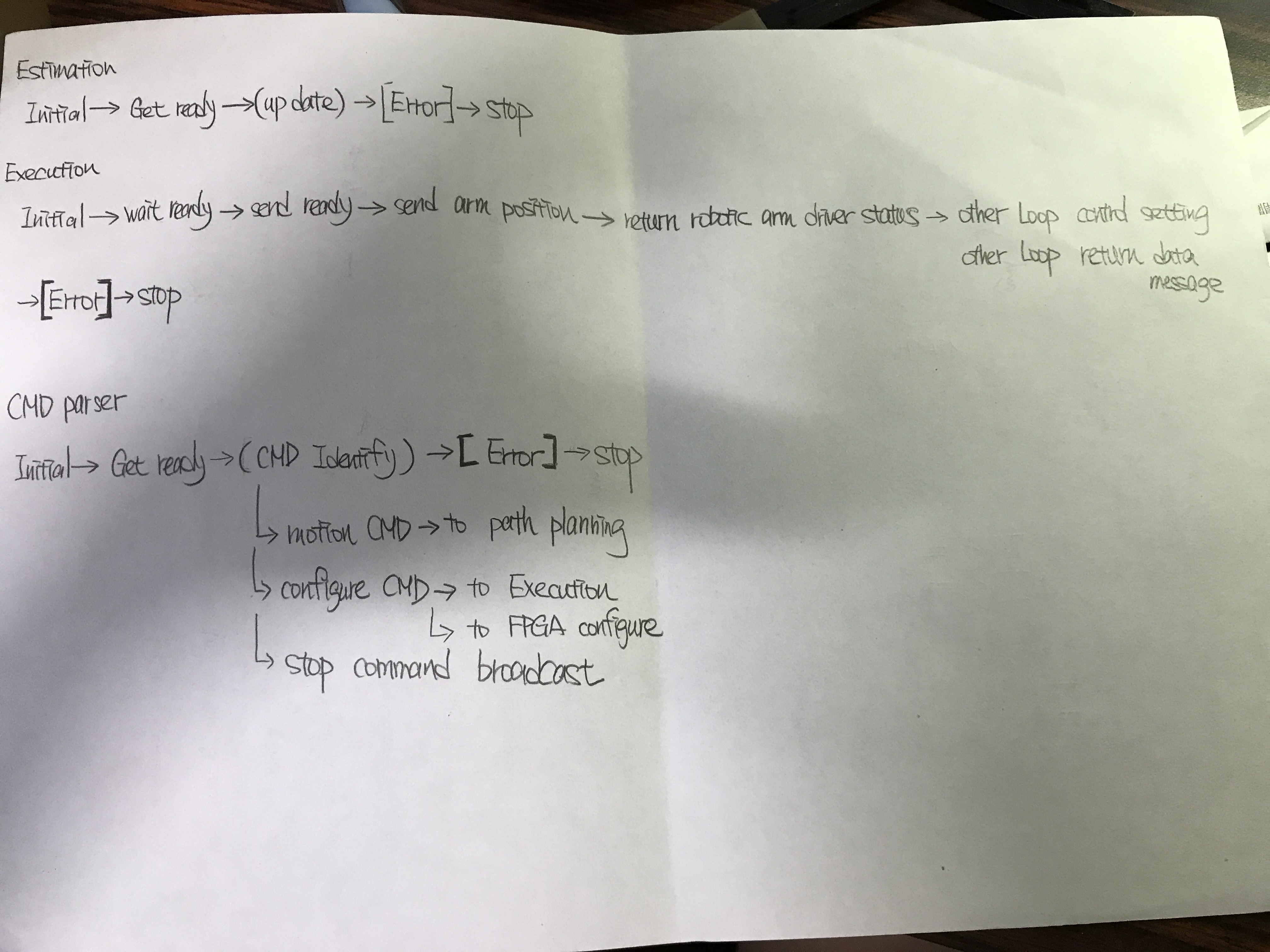
 I use crio-9014 with 6 of NI9505 module to control RM-501 robotic arm. but i have some problem to design suitable architecture: 1.Some component need synchronous. 2.Need to store configure,it can change online. 3.If possible, improve control rate. 4.Some of Data is needed for many component.(Joint Position, Joint Velocity, Cartesian Position, Cartesian Velocity) I decide to use QSM in this application,is this good choice?
I use crio-9014 with 6 of NI9505 module to control RM-501 robotic arm. but i have some problem to design suitable architecture: 1.Some component need synchronous. 2.Need to store configure,it can change online. 3.If possible, improve control rate. 4.Some of Data is needed for many component.(Joint Position, Joint Velocity, Cartesian Position, Cartesian Velocity) I decide to use QSM in this application,is this good choice?
-
 I am working with a Universal Robot arm. I believe it is a UR-5. I was under the assumption that it could be controlled via Modbus, but I found that was incorrect. I need to use URScript commands. I am having a hard time getting started with this. I was wondering if anyone has written a VI that would control the movement of one of these robot arms. Thanks.
I am working with a Universal Robot arm. I believe it is a UR-5. I was under the assumption that it could be controlled via Modbus, but I found that was incorrect. I need to use URScript commands. I am having a hard time getting started with this. I was wondering if anyone has written a VI that would control the movement of one of these robot arms. Thanks.