RaymondTeng
-
Posts
5 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Gallery
Everything posted by RaymondTeng
-

Continuously generate pulse train with variable frequency
RaymondTeng replied to RaymondTeng's topic in LabVIEW General
Thanks for your valuable suggestion! -
Continuously generate pulse train with variable frequency
RaymondTeng replied to RaymondTeng's topic in LabVIEW General
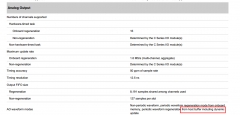
Hi hooovahh , Thank you for your help! My friend has an NI cDAQ 9178 with NI 9401, NI9215 and NI 9263. I found that the specification of cDAQ 9178 have below explanation: Is that the buffer I can use ? If I have buffer, does it mean that I can generate different number of pules at each sample time ? Because I can use the controlling of number of pules instead of changing frequency. Thank you very much. -
-
-
From the album: Pulse
-
From the album: Pulse
-
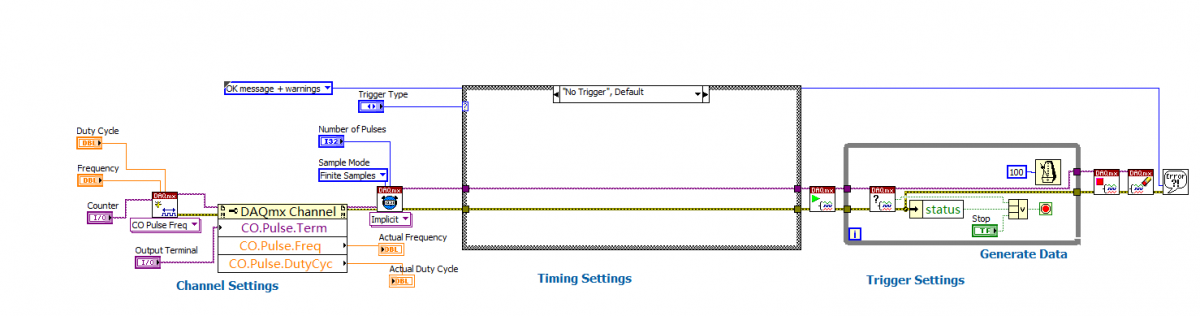
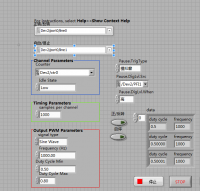
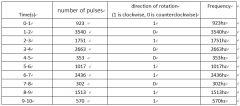
Hi all, I am trying to use NI-USB 6259(BNC) to send Pulse signal to conduct position control of a servo motor with labview. The position control of servo motor follows these rules: 1. The number of the pulse train determines how many degrees the motor rotate ;( e.g. the angular position of motor) 2. The frequency of pulses determines how fast the motor rotate; (e.g. the speed of motor rotating) 3. The digital determines the direction of rotation of motor e.g. clockwise or counterclockwise) My question comes when I need to generate continuously a finite plus train signal in a period of time. Below is a sample: Here is the explanation of this table, the motor keep rotating in clockwise direction during 0~1s. When the time reaches 1s, the motor just complete the rotation of 923 pulse signals. And then the motor starts to rotate in counterclockwise direction during 1s~2s. When the time reaches 2s, the motor just complete the rotation of 3540 pulse signals. So we can see that the rotating speed of motor in 0~1s is different from the speed in 1s~2s. Namely, the frequency of pulse signal in 0~1s is different from the frequency in 1s~2s. I have already use the counter output of DAQmx, it just can generate pulse signal with certain numbers and certain frequency in one time. The attachment is the vi which demonstrates how to generate a finite digital pulse train from a Counter Output Channel and the Frequency, Duty Cycle, Initial Delay, and Idle State are all configurable. How can I generate a series of pulse signal with varying numbers and frequencies during a certain period of time. Thanks a lot! Counter - Finite Output.vi