Search the Community
Showing results for tags 'frequency'.
Found 2 results
-
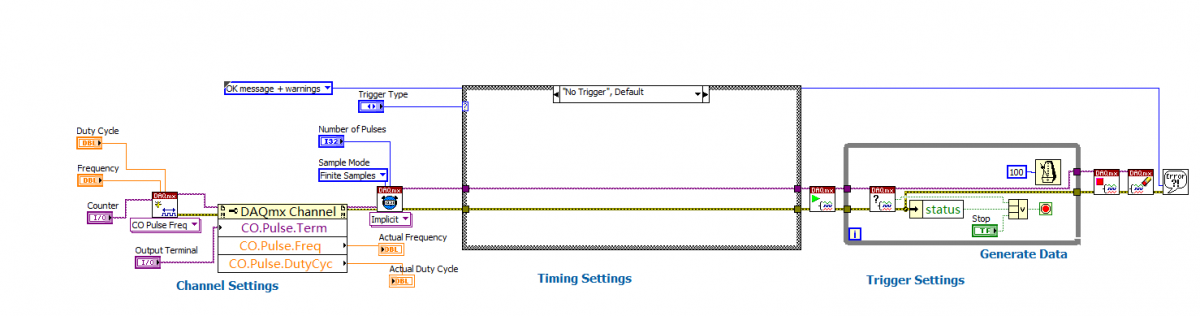
 Hi all, I am trying to use NI-USB 6259(BNC) to send Pulse signal to conduct position control of a servo motor with labview. The position control of servo motor follows these rules: 1. The number of the pulse train determines how many degrees the motor rotate ;( e.g. the angular position of motor) 2. The frequency of pulses determines how fast the motor rotate; (e.g. the speed of motor rotating) 3. The digital determines the direction of rotation of motor e.g. clockwise or counterclockwise) My question comes when I need to generate continuously a finite plus train signal in a period of time. Below is a sample: Here is the explanation of this table, the motor keep rotating in clockwise direction during 0~1s. When the time reaches 1s, the motor just complete the rotation of 923 pulse signals. And then the motor starts to rotate in counterclockwise direction during 1s~2s. When the time reaches 2s, the motor just complete the rotation of 3540 pulse signals. So we can see that the rotating speed of motor in 0~1s is different from the speed in 1s~2s. Namely, the frequency of pulse signal in 0~1s is different from the frequency in 1s~2s. I have already use the counter output of DAQmx, it just can generate pulse signal with certain numbers and certain frequency in one time. The attachment is the vi which demonstrates how to generate a finite digital pulse train from a Counter Output Channel and the Frequency, Duty Cycle, Initial Delay, and Idle State are all configurable. How can I generate a series of pulse signal with varying numbers and frequencies during a certain period of time. Thanks a lot! Counter - Finite Output.vi
Hi all, I am trying to use NI-USB 6259(BNC) to send Pulse signal to conduct position control of a servo motor with labview. The position control of servo motor follows these rules: 1. The number of the pulse train determines how many degrees the motor rotate ;( e.g. the angular position of motor) 2. The frequency of pulses determines how fast the motor rotate; (e.g. the speed of motor rotating) 3. The digital determines the direction of rotation of motor e.g. clockwise or counterclockwise) My question comes when I need to generate continuously a finite plus train signal in a period of time. Below is a sample: Here is the explanation of this table, the motor keep rotating in clockwise direction during 0~1s. When the time reaches 1s, the motor just complete the rotation of 923 pulse signals. And then the motor starts to rotate in counterclockwise direction during 1s~2s. When the time reaches 2s, the motor just complete the rotation of 3540 pulse signals. So we can see that the rotating speed of motor in 0~1s is different from the speed in 1s~2s. Namely, the frequency of pulse signal in 0~1s is different from the frequency in 1s~2s. I have already use the counter output of DAQmx, it just can generate pulse signal with certain numbers and certain frequency in one time. The attachment is the vi which demonstrates how to generate a finite digital pulse train from a Counter Output Channel and the Frequency, Duty Cycle, Initial Delay, and Idle State are all configurable. How can I generate a series of pulse signal with varying numbers and frequencies during a certain period of time. Thanks a lot! Counter - Finite Output.vi
-
Hi all, I'm trying to figure out the most efficient way to use a parameter table in a state machine. Currently, I have converted the ~3x50 element parameter table into an array of the same size. The indexing element in this case happens to be a frequency. At each frequency I need to run the primary action/test. In order to carry the current index through the test I am pulling the row out of the original array and placing it into a separate array that I'll call "Current Freq Index," perform the action, and then pull the next row, etc etc. I like the modularity of the simple state machine but this method of carrying the index to operate on in a separate array seems clunky or inefficient. How does everyone else handle something like this? (The former version is just a for loop indexing off of each frequency, which is simple, but not as extensible as I'd like it to be) Thanks! -G