

sacha tholl
-
Posts
18 -
Joined
-
Last visited
Content Type
Profiles
Forums
Downloads
Gallery
Everything posted by sacha tholl
-

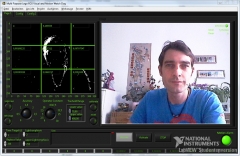
Digitsreader: Video aquisition
sacha tholl commented on sacha tholl's gallery image in Members Gallery
 ...LOL! My first steps in Video aquisition, with a usb video camera Lib from Pete Parente...
...LOL! My first steps in Video aquisition, with a usb video camera Lib from Pete Parente... -
Digitsreader: first functional test
sacha tholl commented on sacha tholl's gallery image in Members Gallery
 Okay.... this was 2006. At that time i was a student, willing to do lots of funny experiments with LabVIEW...8 years later, i look older but i still love to try and try and try :-)
Okay.... this was 2006. At that time i was a student, willing to do lots of funny experiments with LabVIEW...8 years later, i look older but i still love to try and try and try :-) -
Hi Dudes and Co-Zombies, So i have found the solution. Departing from Modo's example about reading DDE-Data from Orbitron, i used the formatstrings. After the tutorial at: http://www.ni.com/white-paper/4531/en/ i was able to get it work and revert the process: HDSDR accepts DDE-data for the Downlink frequency from Orbitron. So i maide LabVIEW pretending it were the Orbitron DDE - Server (same Source, object and item-link).
-
example codes
-
-

From the album: example codes
-
From the album: example codes
-
LoL, I know that this topic is a realy old one - but there is no other one on the net about DDE, LabVIEW and orbital propagation.... So realy need to find a way to test my LabVIEW propagator "in real!", could some LabVIEW engineers or some of the other survivng Zombies help me with this? :-) A reportage about my previous project: http://future.arte.tv/de/gesichter-der-zukunft#article-anchor-11256
-
-
dear menghuihantang, Currently i am trying to find out how to receive skype messages into a labview code. The Message interface is definitively where we have to look on. Some times it works, some times not. Would you mind to show me your code so far, so i could compare yours with mine, trying to find the solution? With best regards Sacha Tholl from Germany
-
Question: "Why do you write programs that the world doesn't need?" Answer: "Because it's cool and it works!!" :-)
-
Question: "Why do you write programs that the world doesn't need?" Answer: "Because it's cool and it works!" :-)
-
Online OCR Of Digital Displays
Images added to a gallery album owned by sacha tholl in Members Gallery
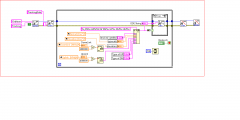
During a project, i had to evaluate the drying propreties of collagenous dispersions.To do so, i had nothing else that i could use but an old balance without any rs232 interface or so. On the other hand i knew that the drying process could have at least a duration of about 48hours and i wanted to record the loss of weight until a constant weight in the equilibrium state (dry) has been reached as this is considerated that the process is finished at the point where you are in an equilibrium state with the moisture of the athmosphere. To do so i wrote an application capable of recording the digits of the balance and translate it into Numbers (floating-point) The application is reading the video stream captured by the old VHS cam. By using of the ocr features of the NI Vision package i let the LED Numbers to be translated in floating point numbers. -
-

From the album: Online OCR Of Digital Displays
I will upload a picture containing the code fragment that handles the ocr asap. -
From the album: Online OCR Of Digital Displays
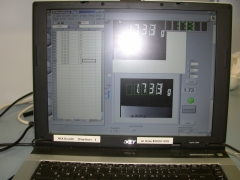
Heureka, it works!! -
From the album: Online OCR Of Digital Displays
Here you see a quick and dirty frontpanel during the first working results. The Application worked but the front panel needed badly to have some cosmetic treatement :-) -
Digitsreader: during developement of the code and some testing....
sacha tholl posted a gallery image in Members Gallery

From the album: Online OCR Of Digital Displays
During developement of the code and some testing with a real sample. -
Digitsreader: during developement of the code and some testing....
sacha tholl posted a gallery image in Members Gallery

From the album: Online OCR Of Digital Displays
Digitsreader: during developement of the code and some testing -

From the album: Online OCR Of Digital Displays
Of course the cam has to have a macro objective to be mounted -
From the album: Online OCR Of Digital Displays
Here you see the video aquisition to be performed of the LED-display of the balance containing the sample of a collagen dispersion in wich the drying process has to be analyzed. -

From the album: Online OCR Of Digital Displays
During a project, i had to evaluate the drying propreties of collagenous dispersions.To do so, i had nothing else that i could use but an old balance without any rs232 interface or so. On the other hand i knew that the drying process could have at least a duration of about 48hours and i wanted to record the loss of weight until a constant weight in the equilibrium state (dry) has been reached as this is considerated that the process is finished at the point where you are in an equilibrium state with the moisture of the athmosphere. To do so i wrote an application capable of recording the digits of the balance and translate it into Numbers (floating-point) The application is reading the video stream captured by the old VHS cam. By using of the ocr features of the NI Vision package i let the LED Numbers to be translated in floating point numbers. -
Lego RCX motion detection watch dog
Images added to a gallery album owned by sacha tholl in Members Gallery
-
-
Lego RCX motion detection watch dog application
sacha tholl posted a gallery image in Members Gallery
From the album: Lego RCX motion detection watch dog
Through a wealth of sensors, such as for examplea compass, a camera, and a distance sensor, the robot can perceive its environment and respond if necessary to it. The sensor data is continuously transmitted via telemetry by IRDA protocol to the computer. Controlling the robot can also be performed interactively via a joystick and voice commands (see my application LISA). The motions of the robot can be recorded odometrically and be replayed through the data transmitted by the compass, the accelerometer and the rotation sensor. -

From the album: Lego RCX motion detection watch dog
This robot sends a video stream to your computer via USB or radion transmission. The captured videostream is the evaluated within the LabVIEW application from the images using NI Vision technology and controls the robot accordingly.

