Leaderboard


Popular Content
Showing content with the highest reputation on 05/30/2011 in all areas
-
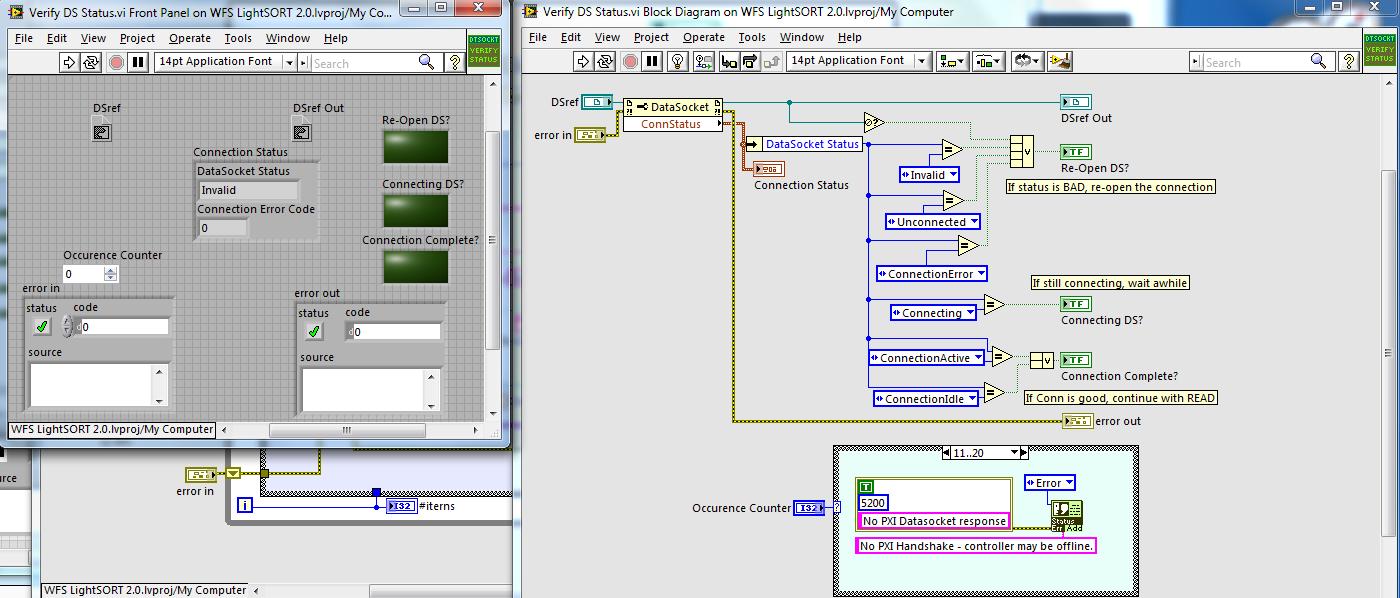
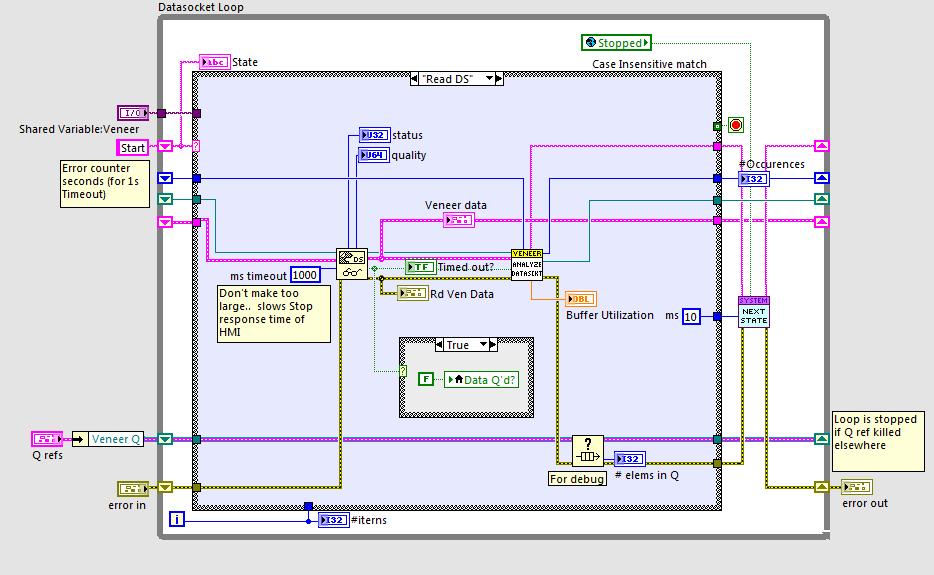
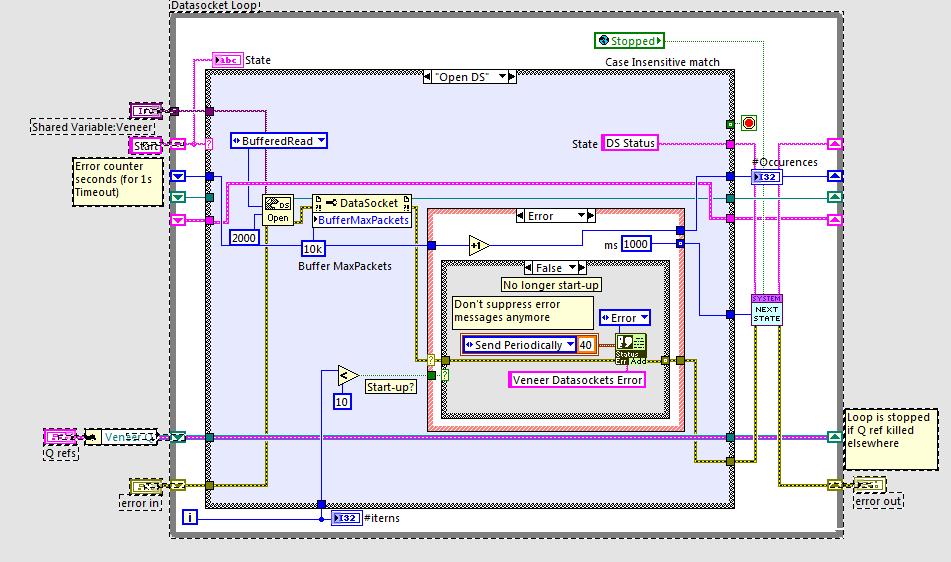
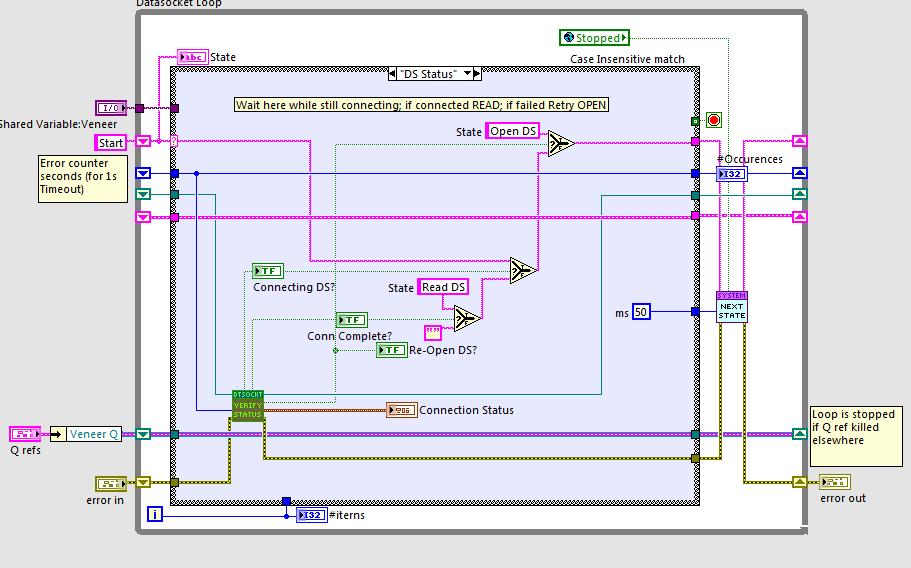
In my experience, they are quite reliable; most bugs have been traced to code other developers have written, rather than any issue with the shared variables themselves. Couple of points: 1 "Important" (regularly updated, critical) shared variables are read using the DataSocket API, where I connect to the SV engine on the RT target, and then monitor the status of my connection. If it goes down, I reconnect, kind of like a TCP loop. The read values are then Q'ed. Prior to implementing the reads in this way, I would get SV's go down when the RT target was being rebooted, and they wouldn't "reconnect" without restarting the HMI (PC) application. 2 Once connection is re-established, the other static Shared variables seem to connect without a problem. Runtime for built executables (between reboots) can be 8 or 9 days. 3 The Shared Variables are hosted on the RT target and number about 70 or so; some are complex clusters, others are SGL's, DBL's, and even an IMAQ image flattened as a string. Some values are buffered, others are not. Here are some screenshots: Neville.
 1 point
1 point -
I just got the results, I passed my CLAD!!! with 77.5% good answers, which was my practice score.Hope I can pass CLD after I graduate (Master degree) I used LabVIEW for everyone, so thanks to Jim Kring and Jeffrey Travis, this book is worth a read!1 point