Leaderboard




Popular Content
Showing content with the highest reputation on 09/03/2020 in all areas
-
@Jim Kring & @drjdpowell Fantastic! Would've taken me ages to sort that out, thank you very much!1 point
-
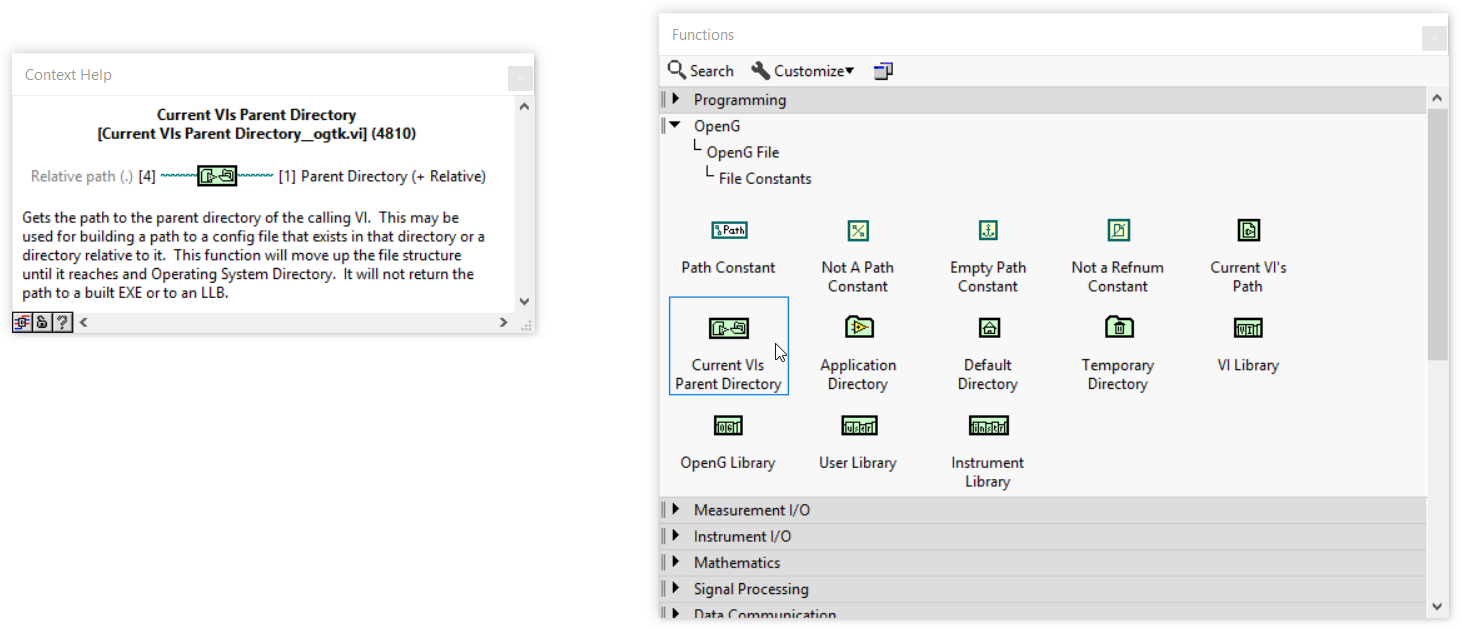
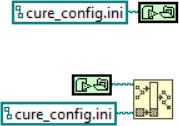
I think that the error is in the use of "Current VI's Path". When you strip up one level in development mode (when the Current VI is directly in a folder) then you get the folder where the VI is located. For an EXE, the VI's path will be nested inside some virtual folders inside the EXE file. Try using the OpenG VI "Get Current VI's Parent Directory.vi" this is a bit smarter in terms of getting the actual OS folder where the VI/Code is located. You can call it like this -- both of these snippets are equivalent.
 1 point
1 point -
You are trying to create your ini file adjacent to your vi; in your exe that path is inside your exe, which cannot have files created in it. You need to have your ini file in a different place.1 point
-
I presume you mean the 3D Cartesian Coordinate Rotation VIs. The NI documentation has a decent description of what they do: https://zone.ni.com/reference/en-XX/help/371361R-01/gmath/3d_cartesian_coordinate_rotation_euler/ These are polymorphic VIs. By default, they take an array of coordinates. If you just want to rotate a single point, select the "Scalar" version of the VI (Put the subVI on your block diagram, then Right-click > Visible Items > Polymorphic VI Selector) The 3x3 matrix is the transformation matrix, which is a concept described in linear algebra. There are different types of transformations: Translation, rotation, shearing, scaling, etc. In a nutshell: Think of your 3D point-coordinates as a 3x1 matrix (also called a column vector). If you multiply a column vector by a 3x3 matrix, you will get a new column vector. That new vector will contain your "transformed" point-coordinates.1 point