
drjdpowell
-
Posts
1,986 -
Joined
-
Last visited
-
Days Won
183
Content Type
Profiles
Forums
Downloads
Gallery
Posts posted by drjdpowell
-
-
This link might be of interest. It redirects stout of System Exec.
-
Using a number of interaction queued message handlers (QMH) is quite a common architecture (sometimes known as “actor-oriented design"). There are multiple packages in the community that people have made available**, and I believe quite a few people have their own private implementations. Personally, I usually have a separate QMH for each independent bit of hardware. I have sometimes done an LVOOP driver (with child types) inside a QMH, which I think is what you are describing.
** Mine is Messenger Library (an introductory video); there is also the Actor Framework (part of LabVIEW), Delacor DQMH, and Aloha, just to name a few that are available on the LabVIEW Tools Network, and you’ll find a few other examples on LAVA such as Message Pump.
-
Do you have specifications for the different types of units? If so, you can query the unit for its type then load something specific to this type. Could be a special INI file for each type, or a child class if you are using LVOOP. The file/class would specify what settings are available.
Are you testing these units, or just using them? With testing you should test to the spec, not query the unit for what it can do. Otherwise you won’t catch a unit that fails to support a setting that it actually should.
-
Seems I made some mistakes in the wiring.
I suspect you had some error in calculating the index. “Insert into array†will fail if you have the wrong index (so inserting at index 3 in a three-element array will produce a four-element array, but inserting at index 4 will silently fail). I would use Build Array instead.
-
Hi,
I am doing a project using your messenger library as it seems very interesting and easy to use.
However, I do have a question about the reentrant actors.
I want to be able to launch multiple instances of the same actor, and afterwards choose to which one of the instances I want to send a message.
I tried to put the actors in an array after launching but that doesn't seem to work.
Is there a way to do this?
Is your actor reentrant? The VI should be named “Actor.vi†(rather than ActorNR.vi) and set as shared-reentrant. If that isn’t the problem please post an image of your launch code. I use arrays of actors in some of my projects (and the library has VIs meant specifically to work with arrays) so it does work.
-
On March 13, 2016 at 1:48 AM, jimc1041 said:
Your instructional videos on the Actor to Actor communication are very informative. However, I had trouble when I tried to modify the examples to utilize your TCP messengers such as would be required for a remote cDAQ/cRIO system. Do you have any examples of this nature?
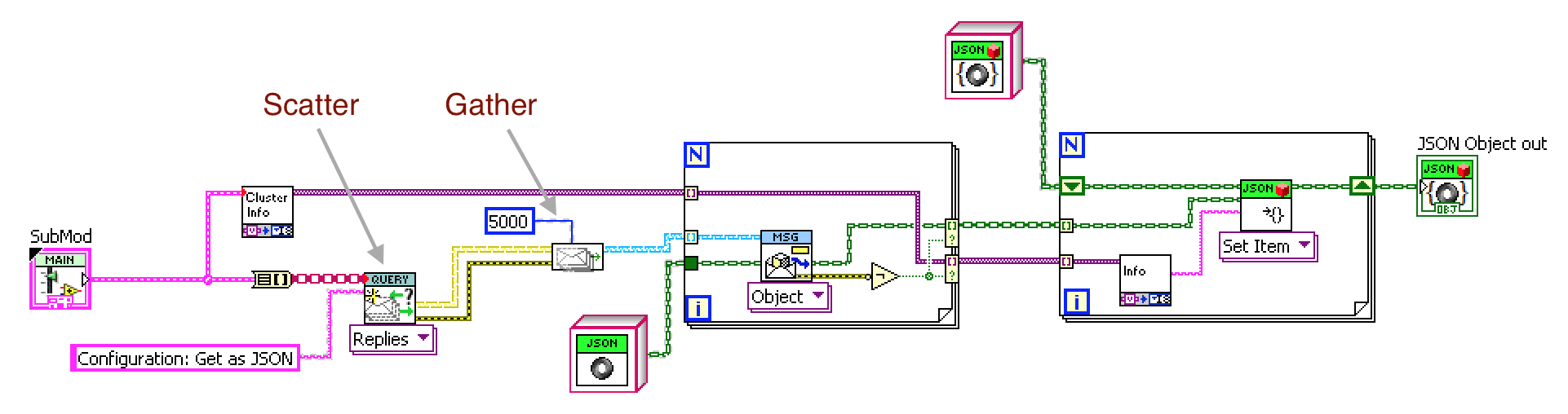
See this new video on youtube. I modified the demo so that 'Instrument' is running on a separate project behind a TCP server, with 'Top Level' connecting as a client via a Remote TCP Messenger. I also showed the use of an 'Address Watchdog' to shutdown 'Top Level' if ‘Instrument' disconnects.
Here is the code (start the server first):
I think I forgot to mention it in the video, but note that the Client project does not load the code of “Instrument", and the Server Project does not load the "Top Level" code. Thus, nothing is locked and you can edit freely (this is a problem in some architectures). This is done internally by the TCP server/client actors by keeping all reply addresses in flattened form on the remote target. If you use custom probes you will see most replies or registrations become something like "Route back to QueueMessenger and then to Flat", which is confusing but means "send back to the TCP actor running this connection, then via TCP to the remote system, and then to this address (unflattening it first)". Please note that only Reply Addresses are converted; you cannot send an address as data in a message and have it work on the remote system (attach it as a Reply Address instead).
Please note that I have yet to do a Real-Time project with Messenger Library. I do have a current project using modified TCP actors to communicate with a non-LabVIEW client from another developer (using JSON messages), but that isn't the same. So please don’t be afraid to ask for help or to make suggestions. Please see if you can run this example with ‘Instrument' on the Real Time system.
-- James
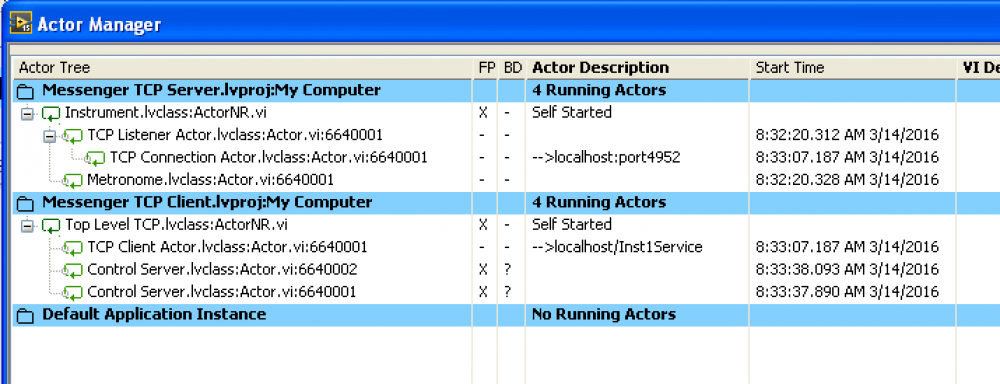
Actor Manager for this TCP example. Note that the 'Control Server' actors are entirely unmodified, and have no knowledge that they are talking to 'Instrument' via TCP. Because everything is by message (no DVRs, no Action Engines) it is easy to convert things to remote operation.
-
 1
1
-
-
I’ve added a couple of more videos about the Register-Notify system used in Messenger Library. A couple of people identified Notifications as something I had not explained sufficiently (especially the difference between an “event†and a “state†notification). So I have added Register Notify and Notification “Hookup†of a dynamic actor (and generic messages). The later video also shows a technique of handling messages to do with multiple controls in a single Variant-based case.
Updated example code:Messenger Library Demo.zip
I’ve also made an initial Introductory video to SQLite in LabVIEW.
-
- Popular Post
- Popular Post
In the later LabVIEW versions, one can open the original copy and select View>>Browse Relationships>>Reentrant Items, and that allows one to open the shared clones.
In older LabVIEW Versions, one can (temporarily) set the VI to "show front panel when calledâ€.
However, if your building a message-based architecture, you can just build in a “show front panel†message to your actors/processes/modules/whatever.
-
3
-
Is it worth making the scalar parser more robust?
Possibly. If one was sending a stream of JSON (including some scalar strings) then this would cause a failure. However, if some of those scalars were number, like 123.456, then there would be no way to be sure you had the full value as 12 or 123.4, etc. are valid JSON. So to guard against partial JSON one might have to require streams to use either an Object or Array.
-
Introductory video now available. I’ll try to make some videos on more advanced techniques when I get the chance.
-
1
-
-
Is anybody using this? I’m revisiting it for the first time in over a year to make some improvements in support of a client. If you have any suggestions, or added feature you would like, now is the time.
-
BLOBs are just a binary data type, same as TEXT but without the need to treat binary data for special characters. Use “Bind BLOB†when your LabVIEW string isn’t actually text.
Have you considered just saving each waveform in a separate file, and storing the filename in SQLite? Then overwriting is easy.
-
Hi James,
Thanks a lot for this library. This is wonderful.
I am using sqlite to store the measurement data. My data is 1D DBL and each waveform is about 5s @ 48k sampling rate so that makes the size of each waveform to be ~2MB. I flatten the data to string and replace any special chars(like NULL and ') and save the data as TEXT. All that is fine but if I want to retrieve say 10 waveforms, it takes about 350-400 ms to return the data which is not acceptable as the code will be used on a production line and time is a very critical factor over there. Also if I use action engines to store the waveforms then retrieving 10 waveforms only takes about 20ms on the same machine. I don't want to use action engines because the amount of data to store is going to be huge and thats why I am inclined to use sqlite.
Is it normal for sqlite to take about 400ms to retrieve 20MB of data?
Thanks,
Ritesh
I’m not sure SQLite is the best choice here. Large waveforms is something TDMS is built for. SQLite is better for structured data where one wants powerful filtering ability to pull out only the small subset of information one needs. TDMS already has useful features like the ability to store scaled U16 values rather than 8-byte DBL (I’ve done this is SQLite, but it more work). You could mix the two approaches, storing metadata about your waveforms in SQLite, along with a filename and waveform name pointing to the TDMS file with the waveforms itself.
BTW, if you store your flattened waveforms as BLOB, then you don’t need to replace any special characters. But, as I said, once one is doing this one has lost to big benefit of SQLite, the ability to query your data, so I think you should consider TDMS.
-
@drjdpowell: I installed the latest version of your library (1.6.2). There is a new VI called "SQLite Database Path" which is missing the output terminal for "Last INSERT RowID":
Oh dear, that was amateurish. This is an unfinished VI that I obviously never tested. Sorry about that. I’ve only been using WITHOUT ROWID tables recently, and in the past I’ve only generated the rowID in LabVIEW and thus never used this dll call.
Added later> fixed 1.6.3 version now in the LAVA-CR (note, LAVA will often have a later version than on the LabVIEW Tools Network)
-
1
-
-
Hi, very nice library here. I am very impressed with it and sqlite.
I was wondering would this library work on labview linux RT?
I don’t have a system to test, but the library attempts to find the copy of libsqlite.so if it is installer on the Linux RT system (see the series of posts starting here). Stobber can give you better information, as he was trying to do this.
-
I’m happy to standardize on ISO8601, it being a standard, but I need time to write it.
-
‘Running†means “reserved for runningâ€. I don’t think the LabVIEW execution system, designed to handle very fast-finishing subVIs without overhead, can actually tell you if a VI is actually running at a specific point in time. What you can do is create a reference (a queue, say) in the async-called VI and pass that back into the caller (via another temporary queue). References like queues are automatically cleaned up when a VI hierarchy goes idle (each async-called VI runs in its own separate hierarchy), so this queue can be used to tell if a VI is still running.
-
Anybody ever done a full ISO8601-timestamp parser in LabVIEW? There are lots of options in ISO8601, and our trial-and-error format method is a poor fit if we really want to support ISO8601.
-
Steven is referring to the array of supported time formats in "JSON Scaler.lvclass:Scan Timestampâ€. His timestamps are valid ISO-8601 format so we should support them.
Note for Steven: That format is local time, plus an offset. LabVIEW Timestamps are in UTC, so I will have to apply the correction.
PS> seems one can just use the format: %^<%Y-%m-%dT%H:%M:%S%12u>T and it will work for any smaller number of digits
-
I use the JSON library in the LAVA CR to hold configuration information. This is often just converted to/from a cluster internally, but the conversion is more tolerant of changes than a straight variant-to-cluster conversation.
-
I think your framework has come far enough now that you need to drop all this "actor" terminology.
Well, I originally called them just “parallel processesâ€, but I adopted the “actor†terminology because it is a standard computer science term. One can google “actor model programming†and learn about the theory, and find many other implementation in multiple languages (Akka, C++ Actor Framework and Erlang are the ones I follow). The terminology isn’t owned by the LabVIEW "Actor Frameworkâ€, and there are other LabVIEW developers that use “actor†or “actor-oriented†terminology, following the Actor Model rather than the AF.
Unfortunately, it is difficult to identify terminology that means the same thing to all people. I used “Observer Pattern†terminology in some of the framework, before realizing that other developers have strange associations with “observer patternâ€.
-
PPL’s eh? Hardcore. Or masochistic, I’m not sure which. I have not had reason to try PPL’s but I believe one needs to think out a library hierarchy, starting from the base, so the first thing one would do is make PPLs out of Messenger Library and any other reuse packages. Then you build a viewcommon PPL, and then finally PPLs for your View subactors.
-
Any thoughts James?
Option (1) seems fine to me. As long as it is a considered architectural decision, making “Project†a service of all the other actors looks like the best trade-off. UI’s are something that I have used option (1) for in the past, because they often are written specifically as a UI for one business-logic actor, know more about that actor than their caller (the overall application manager), yet can’t themselves launch the business-logic actor because their can be multiple UIs for the business actor, and the lifetimes of the UIs can be shorter than the business actor.
One app I had had this:
— MAIN would launch an “Equipment Manager†and pass it equipment config JSON.
— Equipment Manager would dynamically load the equipment, which included Test Steps that equipment could run and Editor actors that could be used to modify those steps (Cameras, for example, needed special editors with imaging).
— Main would register for the list of editors, and allow the User to select among them. When selected, it would launch one and pass it the Equipment Manager. The Editor would register for the info it needed from the Manager (state notifications), and also control the Manager.
MAIN actor itself knew nothing about equipment or Tests and only controled startup, config, and shutdown. In fact, MAIN mostly received no messages all and did nothing most of the time. When the User picked a different Editor, the current one would be shutdown first (only one Editor was alive at any point).
Option (2), I think, is difficult to execute in a way that is worth the effort (easy to make your program harder to understand).
Option (3), custom translators (also, custom “Send†child classes) should by an “ace-in-the-holeâ€, reserved to get you out of trouble, rather than being your primary design tool.
-
You don’t need to you Async Call By Ref, you know, or (yikes) XControls. A standard synchronous Call-by-ref is fine. The simplest is just to have your controls connected to a hidden output-terminal indicators and have the main program poll them for changes at a few Hz. Alternately you just have references to your controls on the block diagram connected to output indicators. Then the main program calls the subVIs once on initialization to get the references and uses dynamic event registration and property nodes to control them (tip: make sure the subVIs front panels are loaded before registering).

[LVTN] Messenger Library
in End User Support
Posted
Personally, I tend to look to see if some of the actor’s data should really include one or more classes, then my subVIs are methods of these classes. I generally try not to have a class that is all the data of the actor, or have subVIs that pass in all the data (you’ll note I don’t even type-def the Internal-Data cluster). I like the high-level actions to be on the top-level block diagram, but the details hidden in more specific subVIs that only act on part of the date. For example, here is a Top-level actor that presents a picture to the User, showing a “pipeline†of analysis actors, where the User may modify the pipeline by adding, deleting, copying and pasting. The code for copy/delete is shown.
This code is basically: If the User selects “Deleteâ€, then identify which icon was clicked on, write the deleted actor to the Clipboard (so the User has the option of pasting it elsewhere in the pipeline), and delete it from the Pipeline list of actors (calling "change pipeline.vi†to complete this).
There are three complicated bits of detail here, but they each only need part of the Internal data. There is a method of the “Icon Picture†object that handles all the details of the picture (rather complex internally); a method of the (not so complicated) “Clipboard†object; and a subVI that acts on arrays of “Pipeline Component†Actors. No subVI needs all actor data.
BTW, the actor class here (your “Solo_Msg.ctlâ€) is actually serving as the address of the actor to external processes, so I wouldn’t try and make it do double duty as an internal-data store. Instead, you could make a different class. You could even have the actor’s caller preconfigure such an object and send it to the actor after launch.