Thang Nguyen
-
Posts
303 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Downloads
Gallery
Everything posted by Thang Nguyen
-
Hi, we just changed the version of SQLite from 1.7.3.65 to 1.16.0.115 and we found out this library have a bug, we believe. This happen when we try to query a record cluster including enum value. In the Execute SQL (Variant Cluster results).vi/Parse Parameters.vi, originally, the enum is return as Int; now it returns as String. This makes the output variant after goes through variant to data converter become invalid data. Sincerely, Thang Nguyen

-

Cannot make 10Gige Camera perform more than 1Gige
Thang Nguyen replied to Thang Nguyen's topic in Machine Vision and Imaging
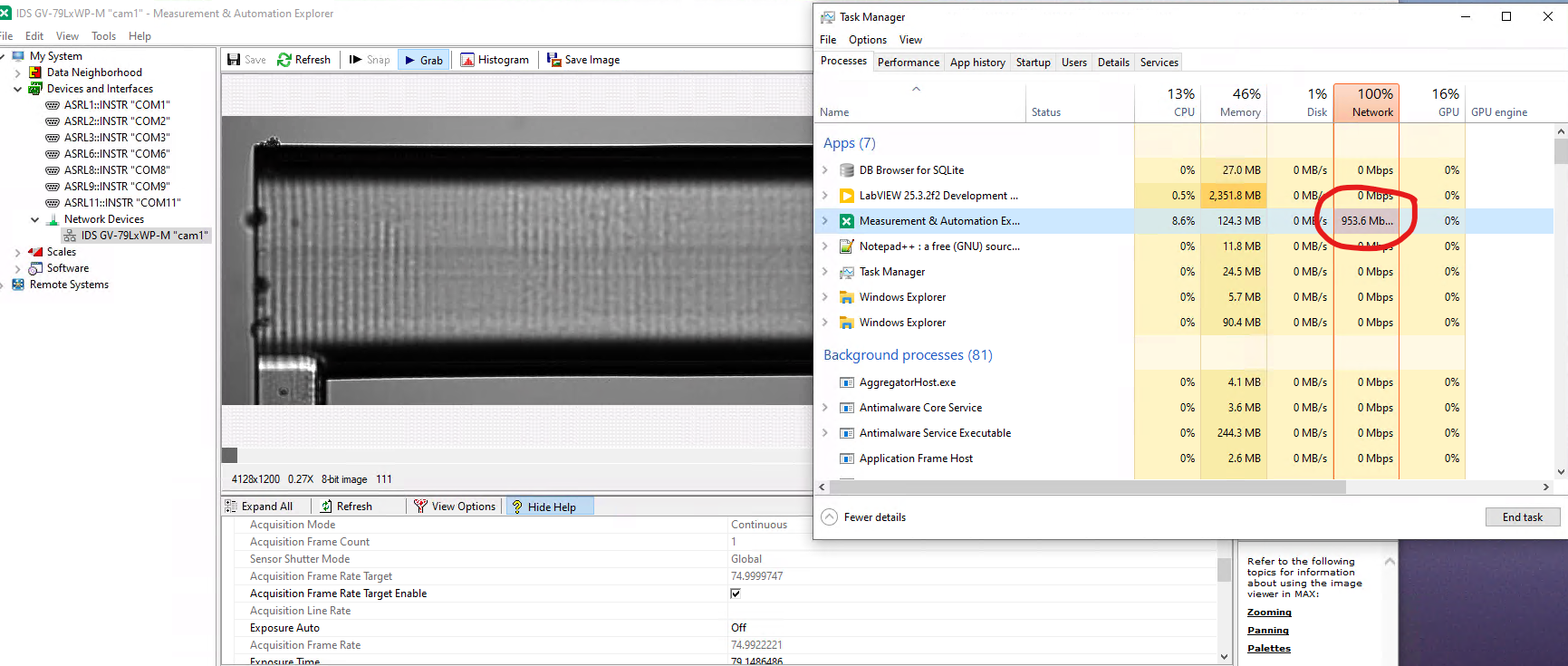
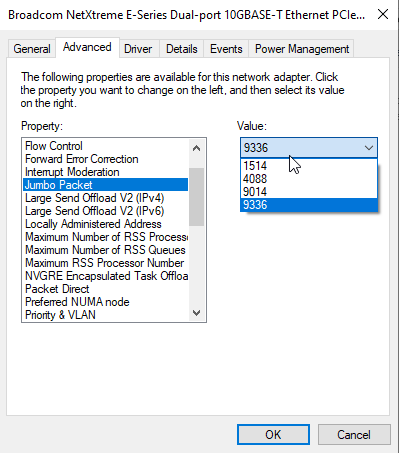
I figured out the issue. I need to set the packet size at acquisition attribute of IMAX. The default value is 1040. It need to set to 8000. -
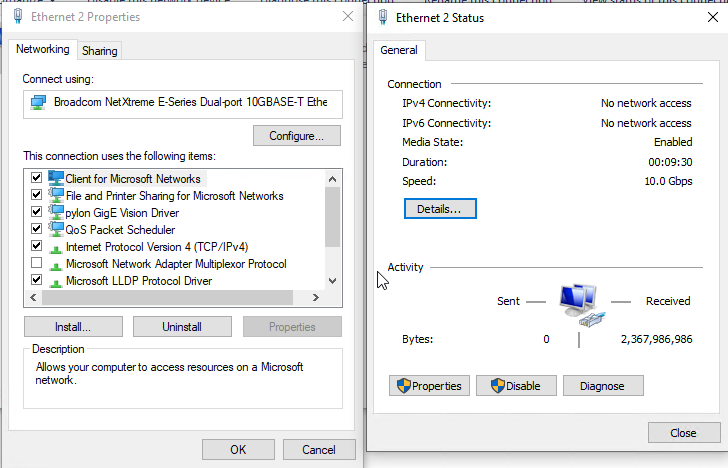
After discussing with NI engineer, I found out LabVIEW can only support 10Gige Camera. So we bought device and set it up. The system include IDS GV-79L0WP-M and Broadcom NetXtreame 10Gige card. The problem we have is the NI MAX cannot acquire more than 1Gbps data speed. I checked all setup like jumbo packet, speed. But any time the speed increase, the network reach 100% and disconnect. I wonder if you have any advice on how to solve this problem. Thank you in advance!
-
Dear all, I am in need looking for information about the system to be able work with 25Gige or 100Gige to improve the performance of the system we are having. I wonder if there is anyone have experience working with a system can give me some information or advice on the camera and any requirement I need to know about LabVIEW package to work with these cameras. Thanks in advance!
-
Thanks for your help regarding my issue about writing override accessor VI. I decided to remove my question because I don't think it is helpful for community. I try to remove the interface class and recreate a new parent class again. At this time, I can changed all inheritance to new parent class as it supposed to be. I don't understand why I cannot do it before.
-
Write multiple images into TDMS file
Thang Nguyen replied to Thang Nguyen's topic in Database and File IO
Thank you. I will try with SQLite then. -
Hi, I am working on a R&D project which need to acquire and record images at 180FPS. I intend to convert image data to byte array then to string then save to TDMS file. I just figured out TDMS does not save string with NULL value. I don't think it's a good idea to save byte array since it will be difficult to index images with a large size array. Could you please give me some advice on what I should do? Sincerely, Thang Nguyen
-
Thanks for all your inputs.
-
I worked in company building EOL test systems for different manufactures which use TestStand and LabVIEW so I understand what need to communicate with different devices and instruments. Now my current company builds bio instrument and there is a requirement from our customers to integrate our instrument to their automation systems. That is why I would like to understand what is the standard of bio automation systems since I don't know much about the automation in bio industry. Now, I guess there is not much different with other industries. Thank you everyone.
-
Hi, I used to work with oil&gas industry which use OPC or modbus, then I work with agriculture vehicle which use CAN. I don't really know what they use to communicate between systems, instrument in bio automation manufacture or lab environment. Could you please share some information with me? Thank you in advance!
-
I am maintaining the code of two controllers (cRIO and CVS) in a system. Each of them handle request from ethernet communication like a server with input is string data type. And each of them handle hundreds of message like that. In the future the number of commands can be increased. Now the fun part is we decide to merge these two controllers into one. I am trying to find the best way to merge these two case structures together and how to handle this better. I am thinking about rewriting this using inherited child class to catch each command. But as I know this only work if I use the child on the client side too. In the future if I need to developer the client by different language such as Python, I am not sure how to send the command to match with side of server.
-
Find out the feature/function you need on your project then search with that specific keyword. Look in Find Examples to see how that is implemented. There are many videos on Youtube nowadays too. Go back here ask with more specific questions
-
LabVIEW Professional: $2,771.00 /year Vision Development Module: $2,021.00 /year This is pricey!
-
I worry about NI hardware controller release
Thang Nguyen replied to Thang Nguyen's topic in Hardware
Thank you very much for your answer. -
I worry about NI hardware controller release
Thang Nguyen replied to Thang Nguyen's topic in Hardware
@Antoine Chalons I am at the phase making decision on specific hardware and OS to run with so I am need to clear up on some information. After doing more research about Windows IOT, specifically Windows IOT Enterprise and Windows Enterprise, I wonder if you choose to use the Windows IOT Enterprise because it comes pre-install on the controller you want to work with? Or because it has some specific features which make you choose to use it? -
I worry about NI hardware controller release
Thang Nguyen replied to Thang Nguyen's topic in Hardware
@Antoine Chalons Thank you very much! Your information is very value to me. -
I worry about NI hardware controller release
Thang Nguyen replied to Thang Nguyen's topic in Hardware
@Antoine Chalons Can I run LabVIEW on Windows Iot? Do you know any limitation? May I ask why do you switch to NI controller since you said you used to use Advantech IPC? -
I worry about NI hardware controller release
Thang Nguyen replied to Thang Nguyen's topic in Hardware
Thanks @Tim_S for the lifecycle page Thanks @Antoine Chalons and @Jordan Kuehn for sharing expert knowledge about vision controller. @Antoine Chalons May I ask if Advantech IPC with Win 10 iot is a good option? Currently, we use only one camera for processing but we plan to update to dual cameras very soon. Can I use LabVIEW with Win 10 iot? -
Our company used NI RT controller CVS-1459 RT. Without any information, they discontinued this controller and suggest us about IC-3121. And we just found out it will discontinue the end of this year. All of this happen in one year. I contacted NI for replacement product and they suggest IC-3120 which has 2 ethernet ports instead of 2 USB 3.0 which we use to connect our cameras. NI engineer then suggest IC-3171 which is $1,700 higher than IC-3121 which is $3,000. What I am worry is we don't have any information ahead. I work with LabVIEW for 15 years. I used to have connection with NI sell representative. Now I don't have any information about the product timeline at all. I contacted with NI sale and they are now Newark company and they cannot answer me about controller replacement. What should I do in this case? Is there any person in NI should I contact with?
-
I contacted NI support and they confirm that CVS/cRIO will not be able to connect with myRIO.
-
Hi, Our current instrument is using CVS-1459. We have a laser device in the instrument. Normally the laser has a separated controller which let us controlled by using serial port or TCP/IP. We are trying a new laser device which only allow to control through DB25 with analog I/O and digital I/O. I figured that I can use a cheap controller as myRIO since my CVS does not support DAQmx to connect with a DAQ device. Now I have no idea how to connect CVS-1459 with myRIO. myRIO uses USB to Ethernet cable. I configure the Ethernet Adapter usb0 on the CVS to the same IP subnet with myRIO but I still cannot ping it. What is the other option I can use for my connection between CVS and myRIO or option to control the laser? Thank you in advance!
-
Does your controller support LV RT Linux in cRIO?
-
Hi, Previously, I posted this question in wrong place. I moved it here. My team is trying to track down a memory leak issue with NI CSV (Compact Vision System). If the RT device run for 4 days it will have "Not enough memory" issue, but we still see available memory. We also limit the obtain reference. I would like to know if there is any property I can use to track down the allocated memory as well as release memory so I can track down on this memory issue. Thanks in advance!