Gribo
-
Posts
241 -
Joined
-
Last visited
-
Days Won
7
Content Type
Profiles
Forums
Downloads
Gallery
Everything posted by Gribo
-
 A bit late, Check with your IT, they might be blocking HTTP access, and only allowing HTTPS.
A bit late, Check with your IT, they might be blocking HTTP access, and only allowing HTTPS. -
Make sure your office installation has the same bitness as LabVIEW. 64-bit office (most recent installations are 64 bits) won't work with LV 32bit.
-
Did you try calling the close method of the player before closing the reference?
-
Can you provide more details? Why is there such a high bandwidth requirement? How many cameras are there in the system? Budget?
-
LabVIEW Installer Takes Over an Hour to Complete – What Could Be Wrong?
Gribo replied to odw's topic in LabVIEW General
All those packages are quite large - even with a fast computer it takes time. -
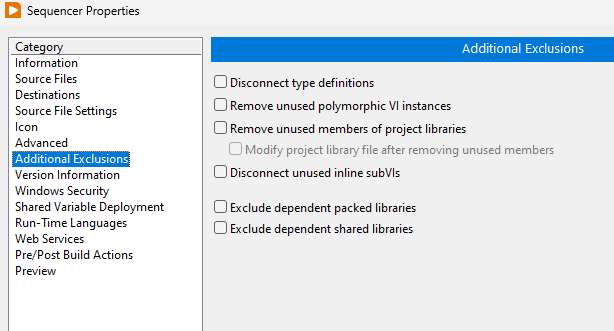
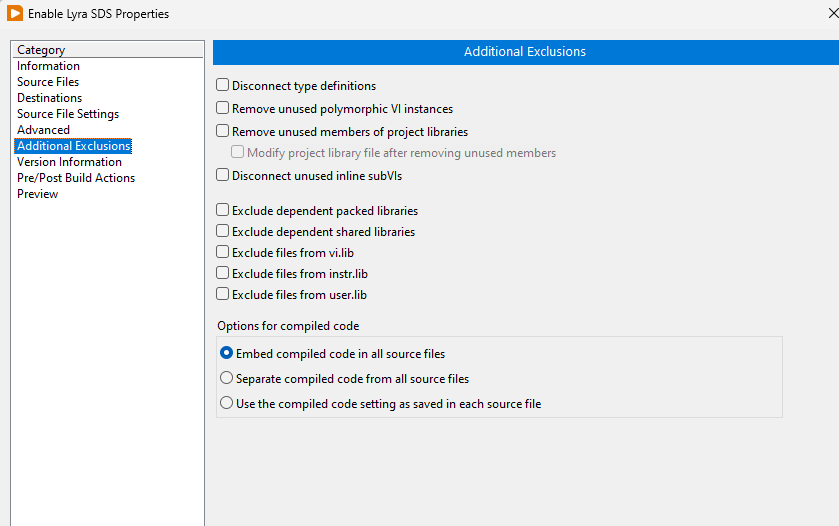
That's the default setting. I'll try the other two.
-
Thanks, I will write a post build script to add the VIMs back to their .lvlibs. Hopefully, I won't find more of those things.
-
That would have disconnected other SubVIs, not just the malleable ones.
-
Here are my build settings: Main app: Module:

-
Hi all, I have a weird problem when building my application. I have a main application that's compiled into an EXE. This application loads modules during run time. The modules are built as a source distributions, with the dependencies copied into a common folder (<main app>\support). The application gets built without an issue, the .EXE works. Once I build a module, the main application breaks, and the reason for it is that few VIMs (and only the VIMs) get disconnected from their .lvlib. Once I fix these, everything is ok. What can cause this issue? Thanks.
-
First, I'm in the same boat as you are, and here are few of my insights: You are trying to create a test sequencer - There are off the shelf products that do that (Teststand is NI's solution - $$$). For architecture, anything from the basic QMH to a full blown actor framework with asynchronous actors can be used - in my case, I have used QMH with few extra threads for safety, logging and report generation. OOP is a way for the designers to think about software modules and abstraction. Do you need such things? Are you planning on supporting multiple models of PSU, loads and other test instruments? If so, OOP provides a convenient way to create those abstraction layers. If you decide on using classes, you should avoid using PPL, they break each other in weird and wonderful ways. For data logging, I suggest both a central parametric database and local Excel or Calc reports. Test templates and deployment: You should consider creating a standardized test template project, along with build specifications, so your operators will use an executable and not the full LV IDE.
-
It is useful only if you use the same calibration agency every time. Otherwise, there is no guarantee that they follow the spec. Most of them won't even know about it - EE, Techs and QA persons, not SW.
-
Can you provide more details? Which camera? What setup? 3d vision is a very big subject.
-
Need help to try and access commands to drive Legacy SD-100 equipment
Gribo replied to George York's topic in Hardware
https://www.physicsforums.com/threads/looking-for-information-on-verity-sd100-monochromator-unit.1058950/ -
RS232 has relatively high signal levels (+-9V) that would fry the DS28E17. You want a 1-Wire capable MCU or a USB adapter. It can be done with an Arduino.
-
You want to create a scan list. At 10Hz, that's 160 relay close, stabilize, measure, relay open operations. You might have to sacrifice resolution to get to that speed.
-
English? NC-link is common in China. I'm sure there are Chinese resources for it.
-
Is PCIe a requirement? FTDI (assuming you get them from reliable sources) produce very reliable USB to RS232 cables. They also have TTL and LVTTL versions.
-
Welcome to SaaS, where what used to be included by default is now subscription based. Make sure your NI rep knows.
-
Model? Make? Protocol?
-
apply trading strategies on labview
Gribo replied to Beatriz Cerqueira's topic in LabVIEW Community Edition
What have you done so far? Can you get the data from your service provider (Google, Bloomberg etc.)? -
What did you do till now? Can you post your code?
-
LAN - Did you set up the R&S IP address? Do you get Ping replies? USB - Did you install the USB drivers from R&S? does the device appear in Windows device manager? What is the model of the SA?
-
Be sure to add a race condition or two..
-
Here is the link: USB Acquisitions Model – JaSSC Inc (jassc-inc.com) You will have to contact the company for support and drivers.